

River dolphins are a particularly vulnerable group of freshwater mammals, occurring in South American and Asian deltas and rivers (Smith & Reeves, Reference Smith and Reeves2012), with the largest populations in the Amazon and Orinoco basins. Although conservation plans have been developed for the Amazon river dolphins (Trujillo et al., Reference Trujillo, Caicedo and Diazgranados2014), implementation has been hampered by a lack of knowledge of their ecology, distribution and behaviour. The large dimensions of this river system, the complex and expensive logistics required to study and survey the dolphins, and general lack of funds limit confidence in population estimates and distribution data. Current survey methods are largely based on distance sampling techniques originally developed for marine species. Distribution of river dolphins is also highly heterogeneous, with preferences for specific habitats, such as confluences, lakes and channels, each requiring different research methodologies. Improving the efficiency of survey techniques to estimate the distribution and density of freshwater species is a priority (Anderson & Gaston, Reference Anderson and Gaston2013).
The potential of unmanned aerial vehicles (UAVs) for environmental monitoring is being increasingly recognized because of the opportunities they offer for cost- and time-efficient surveys (Hardin & Hardin, Reference Hardin and Hardin2010; Hodgson et al., Reference Hodgson, Baylis, Mott, Herrod and Clarke2016), including for aquatic mammals (Jones et al., Reference Jones, Pearlstine and Percival2006; Martin et al., Reference Martin, Edwards, Burgess, Percival, Fagan and Gardner2012; Hodgson et al., Reference Hodgson, Peel and Kelly2017). Detection of individual animals is the first step in assessing the feasibility of UAVs for wildlife studies (Hodgson et al., Reference Hodgson, Peel and Kelly2017). Here we evaluate the effectiveness of UAVs for the detection of two Amazon dolphin species, the tucuxi Sotalia fluviatilis and pink river dolphin Inia geoffrensis.
During 16–21 November 2016 we surveyed river dolphins along 80 km of the Juruá River, Brazil (Fig. 1). Two small quadcopters (DJI Phantom 3 and 4, SZ DJI Technology Co., Shenzhen, China), deployed in turn from the upper deck of a boat traveling at a constant speed, were positioned at a 20-m fixed altitude above the water, 50 m from the side of the boat, monitoring a 100-m stretch parallel to the river margin (Plate 1a). Video was continually recorded using a camera positioned at 35° to the water surface. The objective was to compare counts by UAVs and observers made from similar perspectives. The UAVs were remotely-controlled using live video, while being visually monitored. To ensure minimal disturbance to wildlife and the safety of researchers, use of UAVs followed operational protocols and best practices (Hodgson & Koh, Reference Hodgson and Koh2016). Preliminary flights in areas with high population densities of both species enabled us to secure the number of observations necessary to assess detectability and to evaluate the possible impacts of UAVs on dolphin behaviour.

Fig. 1 Stretches of the Juruá River, Brazil, surveyed for the tucuxi Sotalia fluviatilis and pink river dolphin Inia geoffrensis.
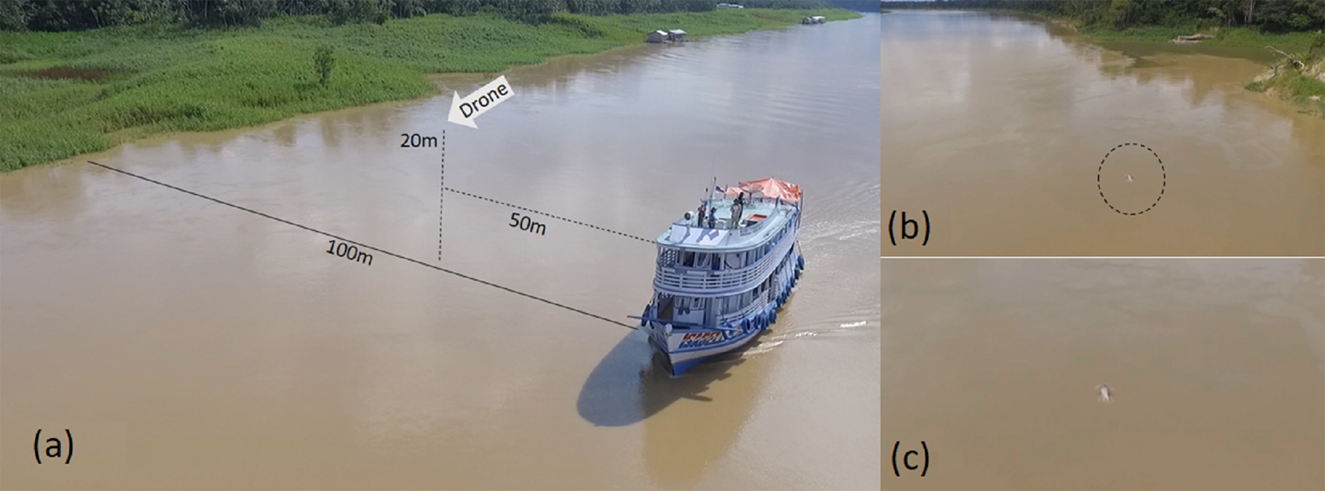
Plate 1 (a) The positions of the boat and the drone during surveys of the Juruá River (Fig. 1). (b) Pink river dolphin detected by the drone. (c) Detail of animal detected in (b).
We carried out a total of 41 10-minute flights. A boat-based survey was simultaneously performed from the same double-decker boat, with two observation platforms 8 m above water level. Three observers at the bow and two at the stern actively searched for dolphins. The boat navigated at 10 km/h on average, following the line-transect sampling protocol outlined by Gomez-Salazar et al. (Reference Gomez-Salazar, Trujillo, Portocarrero-Aya and Whitehead2012). For each sighting, observers reported species, group size, the presence of calves, sighting angle relative to the trackline, and estimated distances from the boat and from the river margin.
All video footage was systematically examined by three experienced researchers, on a 50 inch screen. We recorded a total of 7 hours of footage and in most detections it was possible to differentiate between species (Plate 1b,c). Information regarding time of sightings and dolphin locations (sighting angle, distance from the margin and from the boat), from the footage and visual records, were used to compare the results of the two observation methods.
We detected a total of 124 dolphins in the video footage and 175 from the boat-based observations. The total number of observations (groupings of individuals sighted) for both methods combined was 151. Of these, on-board observers made 119 observations, of which 76 were confirmed by the UAV. The UAV recorded 108 observations, of which 32 were exclusively made by this platform, with no confirmation from the boat. Of the total area assessed, 68 km of the Juruá River was monitored using both methods.
We believe that much of the difference in counts between the two methods was because of the limited resolution of the drone's camera at the distances at which the dolphins were detected. The maximum distance for animal detection was c. 100 m using UAVs, whereas on-board sightings were up to 300 m from the bow of the boat. The use of optical zoom cameras or higher-resolution cameras could improve the distance of detection. Although the UAV images allowed us to distinguish several individual dolphins surfacing at the same time across a broad reach of the river, an observer can only focus on one event at a time. For records in which dolphins were not clearly visible, identification was based on the behavioural differences between the species, such as surfacing, breathing and breaching patterns. As a result of the dolphins’ erratic and brief surfacing behaviour (Reeves et al., Reference Reeves, Smith and Kasuya2000), individuals can be missed or double-counted with either of the methods we used (Fürstenau Oliveira et al., Reference Fürstenau Oliveira, Georgiadis, Campello, Brandão and Ciuti2017). However, the aerial survey provided higher accuracy in counting individuals during the detection of groups. The images captured by UAVs can confirm identifications and facilitate correlation between species and use of habitats (Martin et al., Reference Martin, Edwards, Burgess, Percival, Fagan and Gardner2012) with a high degree of precision. The use of drones can also reduce the bias caused by responsive movement (Dawson et al., Reference Dawson, Wade, Slooten and Barlow2008).
No signs of disturbance (rapid or erratic movements, shorter surface time, or otherwise abnormal behaviour) were observed among the dolphins as a result of the operation of the UAVs, which was at altitudes of 10–30 m above the river surface. During the flights at 20 m some bird species demonstrated defensive territorial behaviour and followed the aircraft for varying amounts of time, although no actual attacks were observed.
Small multi-rotor UAVs were chosen because of their vertical take-off and landing capability, which was required for operation from a moving boat, and their stability in flight, which facilitates capturing of stable images (Jones et al., Reference Jones, Pearlstine and Percival2006). However, under conditions of strong winds take-off and landing while the boat was moving were challenging.
The use of this technology for wildlife surveys generates a large quantity of data. Manual processing of these data is time-consuming and susceptible to human error. This can, however, be overcome using automated counting of animals in imagery (Hodgson et al., Reference Hodgson, Peel and Kelly2017; Adams, Reference Adams2018). We processed data for this study manually but we are currently developing an algorithm to automatically detect dolphins in drone-generated images.
Our study has demonstrated that UAVs can be used to detect Amazon River dolphin species and potentially to improve estimates that were formerly obtained using visual surveys. This technology could be less expensive (Kudo et al., Reference Kudo, Koshino, Eto, Ichimura and Kaeriyama2012) compared to more labour-intensive methods. We recommend that future studies evaluate the efficacy of UAVs for surveys of freshwater dolphins in narrow waterways (< 200 m), where visual surveys are conducted from canoes and cross-channel transects are not feasible, hampering the use of the distance model. In addition, research is required on whether disturbance by the boat may be masking the ability of UAVs to gather accurate data. Comparing counts generated from UAV images with distance sampling estimates obtained from visual surveys is critical to assess the utility of the former technique as a stand-alone method or when used in conjunction with existing techniques. If UAV surveys prove to be pivotal in improving population and distribution estimates of river dolphins, then a strategic plan to improve data throughout the region should be developed and implemented.
Acknowledgments
This research was supported by Ecosia and WWF-Netherland's Innovation Fund. We thank colleagues from ICMBio and SEMA-AM for field support. This study is aligned with the South American River Dolphin Initiative, a multi-country collaborative effort for the conservation of Amazon river dolphins, and we thank the representatives from the five countries engaged. Comments by two anonymous reviewers greatly improved the text.
Author contributions
Study design and fieldwork: MOC, MM, DSXR, AC, FM; data analysis and writing: MOC, MM, SW, FM, FT.
Conflicts of interest
None.
Ethical standards
This study followed the Brazilian regulations for UAV operation. Privacy of researchers and field workers was respected at all times. Safety was a primary concern and disturbance of wildlife was not observed during the surveys. This research abided by the Oryx guidelines on ethical standards.



 Open access
Open access