



No CrossRef data available.
Published online by Cambridge University Press: 05 April 2023
The sedimentation of two spherical solid objects in a viscous fluid has been extensively investigated and well understood. However, a pair of flat disks (in three dimensions) settling in the fluid shows more complex hydrodynamic behaviour. The present work aims to improve the understanding of this phenomenon by performing direct numerical simulation and physical experiments. The present results show that the sedimentation processes are significantly influenced by disk shape, characterized by a dimensionless moment of inertia I*, and Reynolds number Re of the leading disk. For the flatter disks with smaller I*, steady falling with enduring contact transits to periodic swinging with intermittent contacts as Re increases. The disks with larger I* tend to fall in a drafting-kissing-tumbling mode at low Re and to remain separated at high Re. Based on I* and Re, a phase diagram is created to classify the two-disk falling into ten distinctive patterns. The planar motion or three-dimensional motion of the disks is determined primarily by Re. Turbulent disturbance flows at a high Re contribute to the chaotic three-dimensional rotation of the disks. The chance for the two disks to contact is increased when I* and Re are reduced.
Simulation movie of AR=0.1 and Re = 100 for Figure 10

Experimental movie of AR=0.1 and Re = 100 for Figure 10
Simulation movie of AR=0.1 and Re = 255 for Figure 13
Experimental movie of AR=0.1 and Re = 255 for Figure 13
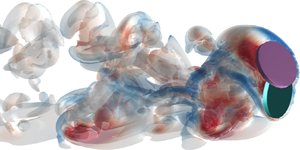
Simulation movie of AR=1 and Re = 1000 for Figure 17
Experimental movie of AR=1 and Re = 1000 for Figure 17