




Crossref Citations
This article has been cited by the following publications. This list is generated based on data provided by Crossref.
Shi, Anni
and
Schwartz, Daniel K.
2024.
Bridging Macroscopic Diffusion and Microscopic Cavity Escape of Brownian and Active Particles in Irregular Porous Networks.
ACS Nano,
Vol. 18,
Issue. 34,
p.
22864.
Hong, Yishan
Zou, Hongyi
Yang, Lijun
Li, Yitan
and
Dong, Ruo-Yu
2025.
Granular flow–solid wall interaction: investigation of the teapot effect.
Soft Matter,
Vol. 21,
Issue. 19,
p.
3741.
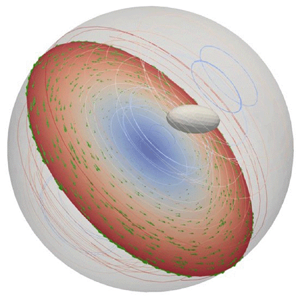
Sun, Zhuang
de Pablo, Juan J.
and
Jiang, Xikai
2025.
Dynamics of a spherical particle in a low-Reynolds-number fluid confined between two concentric spherical walls.
Journal of Fluid Mechanics,
Vol. 1018,
Issue. ,
Magrinya, Paula
Palacios-Alonso, Pablo
Llombart, Pablo
Delgado-Buscalioni, Rafael
Alexander-Katz, Alfredo
Arriaga, Laura R.
and
Aragones, Juan L.
2025.
Rolling vesicles: From confined rotational flows to surface-enabled motion.
Proceedings of the National Academy of Sciences,
Vol. 122,
Issue. 13,