


1. Introduction
The motion of microparticles near boundaries is of broad interest because the proximity of boundaries is all but unavoidable in most real situations. Particle–wall interactions can have important biological and technological implications such as the segregation of blood cells and platelets in vessels and the techniques of particle manipulation in microfluidic channels. More recently, the locomotion of bacteria near surfaces and its connection to biofilm formation have received considerable attention (Lauga et al. Reference Lauga, DiLuzio, Whitesides and Stone2006; Lemelle et al. Reference Lemelle, Palierne, Chatre and Place2010; Di Leonardo et al. Reference Di Leonardo, Dell'Arciprete, Angelani and Iebba2011; Morse et al. Reference Morse, Huang, Li, Maxey and Tang2013). In the development of artificial microswimmers, it is also crucial to account for the presence of boundaries, which may lead to propulsion enhancement or hindrance, and trapping or guiding of these swimmers (Spagnolie & Lauga Reference Spagnolie and Lauga2012; Takagi et al. Reference Takagi, Palacci, Braunschweig, Shelley and Zhang2014; Elgeti & Gompper Reference Elgeti and Gompper2016). In particular, a class of artificial microswimmers, known as surface walkers or microrollers, exploit their interactions with nearby surfaces to generate directed propulsion (Tierno et al. Reference Tierno, Golestanian, Pagonabarraga and Sagués2008; Sing et al. Reference Sing, Schmid, Schneider, Franke and Alexander-Katz2010; Driscoll et al. Reference Driscoll, Delmotte, Youssef, Sacanna, Donev and Chaikin2017). These microswimmers are driven into rotation typically by external magnetic fields. Symmetry breaking in the proximity of a boundary rectifies their rotation into translation, analogous to rolling of a wheel on a solid surface. The simplicity and effectiveness of these microrollers demonstrate vast opportunities for applications in targeted therapeutics and microsurgery (Alapan et al. Reference Alapan, Bozuyuk, Erkoc, Karacakol and Sitti2020; Ahmed et al. Reference Ahmed, Sukhov, Hauri, Rodrigue, Maranta, Harting and Nelson2021).
Particle–wall interactions at low Reynolds numbers are well studied in a Newtonian fluid. Emerging biomedical applications of micromachines in complex biological fluids, however, prompt new questions on the impact of non-Newtonian rheology on these interactions (Elfring & Lauga Reference Elfring and Lauga2015; Sznitman & Arratia Reference Sznitman and Arratia2015). In particular, biological fluids such as blood and mucus are typically shear-thinning fluids (Cho & Kensey Reference Cho and Kensey1991; Gijsen, van de Vosse & Janssen Reference Gijsen, van de Vosse and Janssen1999; Li et al. Reference Li, Luo, Chin, Hill, Johnson and Bird2008), which lose viscosity with applied strain rates due to changes in the fluid microstructure. Recent studies have uncovered the profound effects of shear-thinning rheology on locomotion (Montenegro-Johnson, Smith & Loghin Reference Montenegro-Johnson, Smith and Loghin2013; Vélez-Cordero & Lauga Reference Vélez-Cordero and Lauga2013; Datt et al. Reference Datt, Zhu, Elfring and Pak2015; Li & Ardekani Reference Li and Ardekani2015; Montenegro-Johnson Reference Montenegro-Johnson2017), impacting both living micro-organisms and artificial swimmers (Gagnon, Keim & Arratia Reference Gagnon, Keim and Arratia2014; Gagnon & Arratia Reference Gagnon and Arratia2016; Park et al. Reference Park, Kim, Shin and Weitz2016; Gómez et al. Reference Gómez, Godínez, Lauga and Zenit2017; Demir et al. Reference Demir, Lordi, Ding and Pak2020; Qu & Breuer Reference Qu and Breuer2020). The non-Newtonian fluid behaviour also enables locomotion otherwise impossible in a Newtonian fluid (Qiu et al. Reference Qiu, Lee, Mark, Morozov, Münster, Mierka, Turek, Leshansky and Fischer2014; Han et al. Reference Han, Shields IV, Bharti, Arratia and Velev2020).
In this work, we report some intriguing effects of shear-thinning rheology on the translation–rotation coupling of a particle near a wall. Such coupling is relevant to not only the propulsion of microrollers but also the near-wall dynamics of swimming bacteria in complex fluids. One particularly interesting feature revealed in this work is that the wall-induced translation by a rotating particle can occur in a direction opposite to what might be intuitively expected in a Newtonian fluid. We elucidate the physical mechanism underlying the counterintuitive phenomena and discuss its implications on the design and control of micromachines in complex biological fluids. Our results also suggest a plausible mechanism for the observed directional change in circular motion of swimming bacteria near a solid wall in complex fluids. In addition, the features reported may inspire novel techniques for particle manipulation in microfluidics with non-Newtonian flows and microrheological measurements.
2. Theoretical framework
Classical results of wall-induced translation of a rotating object were obtained in a Newtonian fluid in the Stokes regime. For the three-dimensional (3-D) Stokes flow around a rotating sphere near a plane wall (Dean & O'Neill Reference Dean and O'Neill1963; O'Neill Reference O'Neill1964, Reference O'Neill1967), the sphere translates parallel to the wall in a direction consistent with the rolling of a sphere along the wall, without any velocity component normal to the wall,  $\boldsymbol {U} = U \boldsymbol {e}_x$; see notation and set-up in figure 1. The direction of induced translation can be understood as a consequence of the fact that the rotating sphere causes higher velocity gradients in the fluid gap between the sphere and the wall and hence a larger hydrodynamic force on the side of the sphere closer to the wall than that on the other side. The force imbalance thus drives the sphere to translate in a direction expected for a rolling sphere on a solid substrate via friction asymmetry.
$\boldsymbol {U} = U \boldsymbol {e}_x$; see notation and set-up in figure 1. The direction of induced translation can be understood as a consequence of the fact that the rotating sphere causes higher velocity gradients in the fluid gap between the sphere and the wall and hence a larger hydrodynamic force on the side of the sphere closer to the wall than that on the other side. The force imbalance thus drives the sphere to translate in a direction expected for a rolling sphere on a solid substrate via friction asymmetry.

Figure 1. Wall-induced translation of a rotating cylinder or sphere of radius  $a$ at a distance
$a$ at a distance  $h$ above a plane wall. Upon a prescribed rotational velocity
$h$ above a plane wall. Upon a prescribed rotational velocity  $\boldsymbol {\varOmega }=-\varOmega \boldsymbol {e}_z$, the particle translates parallel to the wall with an unknown velocity
$\boldsymbol {\varOmega }=-\varOmega \boldsymbol {e}_z$, the particle translates parallel to the wall with an unknown velocity  $\boldsymbol {U}=U \boldsymbol {e}_x$. In this work, the case
$\boldsymbol {U}=U \boldsymbol {e}_x$. In this work, the case  $U>0$ (
$U>0$ ( $U<0$) is referred to as the forward (backward) mode.
$U<0$) is referred to as the forward (backward) mode.
Surprisingly, a later two-dimensional (2-D) analysis by Jeffrey & Onishi (Reference Jeffrey and Onishi1981) found that the 2-D Stokes flow around a rotating cylinder near the wall yields exactly zero induced translation, despite the broken symmetry due to the wall. Here, we revisit these classical results on translation–rotation coupling near a wall and examine how shear-thinning rheology modifies the coupling in both the 2-D and 3-D cases. In particular, the fact that there is no induced translation in the Newtonian 2-D case allows us to attribute any translation in a shear-thinning fluid in two dimensions solely to the non-Newtonian rheology.
2.1. Asymptotic analysis
We begin our analysis with the momentum and continuity equations for an incompressible flow in the low-Reynolds-number limit,
 \begin{equation} \boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{\sigma} = \boldsymbol{0},\quad \boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{u}=0, \end{equation}
\begin{equation} \boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{\sigma} = \boldsymbol{0},\quad \boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{u}=0, \end{equation}
where  $\boldsymbol {u}$ is the fluid velocity,
$\boldsymbol {u}$ is the fluid velocity,  $\boldsymbol {\sigma } = -p {\boldsymbol{\mathsf{I}}}+\boldsymbol {\tau }$ is the stress tensor, and
$\boldsymbol {\sigma } = -p {\boldsymbol{\mathsf{I}}}+\boldsymbol {\tau }$ is the stress tensor, and  $p$ and
$p$ and  $\boldsymbol {\tau }$ are the pressure and the deviatoric stress, respectively. To capture the shear-thinning behaviour, we use the Carreau constitutive equation, which was shown to describe effectively the viscosity
$\boldsymbol {\tau }$ are the pressure and the deviatoric stress, respectively. To capture the shear-thinning behaviour, we use the Carreau constitutive equation, which was shown to describe effectively the viscosity  $\eta$ of different biological fluids (Bird, Armstrong & Hassager Reference Bird, Armstrong and Hassager1987; Vélez-Cordero & Lauga Reference Vélez-Cordero and Lauga2013),
$\eta$ of different biological fluids (Bird, Armstrong & Hassager Reference Bird, Armstrong and Hassager1987; Vélez-Cordero & Lauga Reference Vélez-Cordero and Lauga2013),
 \begin{equation} \eta = \eta_\infty + (\eta_0-\eta_\infty)(1+\lambda^{2} |\dot{\gamma}|^{2})^{(n-1)/2}. \end{equation}
\begin{equation} \eta = \eta_\infty + (\eta_0-\eta_\infty)(1+\lambda^{2} |\dot{\gamma}|^{2})^{(n-1)/2}. \end{equation}
Here  $\eta _0$ and
$\eta _0$ and  $\eta _\infty$ represent, respectively, the zero- and infinite-shear-rate viscosities, and the strain-rate tensor
$\eta _\infty$ represent, respectively, the zero- and infinite-shear-rate viscosities, and the strain-rate tensor  $\dot {\boldsymbol {\gamma }}=\boldsymbol {\nabla } \boldsymbol {u}+(\boldsymbol {\nabla } \boldsymbol {u})^{\textrm {T}}$ has a magnitude
$\dot {\boldsymbol {\gamma }}=\boldsymbol {\nabla } \boldsymbol {u}+(\boldsymbol {\nabla } \boldsymbol {u})^{\textrm {T}}$ has a magnitude  $|\dot {\gamma }|=(\dot {\gamma }_{ij}\dot {\gamma }_{ij}/2)^{1/2}$. The power-law index
$|\dot {\gamma }|=(\dot {\gamma }_{ij}\dot {\gamma }_{ij}/2)^{1/2}$. The power-law index  $n<1$ characterizes the degree of shear thinning, and
$n<1$ characterizes the degree of shear thinning, and  $1/\lambda$ characterizes the critical shear rate at which the non-Newtonian behaviour becomes significant. Henceforth, we use dimensionless variables with time, length and stress scaled by
$1/\lambda$ characterizes the critical shear rate at which the non-Newtonian behaviour becomes significant. Henceforth, we use dimensionless variables with time, length and stress scaled by  $1/\varOmega$,
$1/\varOmega$,  $a$ and
$a$ and  $\eta _0 \varOmega$, respectively. The dimensionless nonlinear constitutive equation is therefore given by
$\eta _0 \varOmega$, respectively. The dimensionless nonlinear constitutive equation is therefore given by
 \begin{equation} \boldsymbol{\tau} = [\beta+(1-\beta)(1+Cu^{2} |\dot{\gamma}|^{2})^{(n-1)/2}]\dot{\boldsymbol{\gamma}}, \end{equation}
\begin{equation} \boldsymbol{\tau} = [\beta+(1-\beta)(1+Cu^{2} |\dot{\gamma}|^{2})^{(n-1)/2}]\dot{\boldsymbol{\gamma}}, \end{equation}
where the Carreau number,  $Cu = \lambda \varOmega$, compares the rotational rate to the critical shear rate of the shear-thinning fluid, and
$Cu = \lambda \varOmega$, compares the rotational rate to the critical shear rate of the shear-thinning fluid, and  $\beta =\eta _\infty /\eta _0 \le 1$ is the viscosity ratio.
$\beta =\eta _\infty /\eta _0 \le 1$ is the viscosity ratio.
We consider the weakly nonlinear (non-Newtonian) limit by expanding
 \begin{equation} \{\boldsymbol{u},\dot{\boldsymbol{\gamma}},p,\boldsymbol{\sigma}, \boldsymbol{U}\} = \{\boldsymbol{u}_0,\dot{\boldsymbol{\gamma}}_0,p_0,\boldsymbol{\sigma}_0, \boldsymbol{U}_0\}+ \epsilon \{\boldsymbol{u}_1,\dot{\boldsymbol{\gamma}}_1,p_1,\boldsymbol{\sigma}_1, \boldsymbol{U}_1\} +O(\epsilon^{2}), \end{equation}
\begin{equation} \{\boldsymbol{u},\dot{\boldsymbol{\gamma}},p,\boldsymbol{\sigma}, \boldsymbol{U}\} = \{\boldsymbol{u}_0,\dot{\boldsymbol{\gamma}}_0,p_0,\boldsymbol{\sigma}_0, \boldsymbol{U}_0\}+ \epsilon \{\boldsymbol{u}_1,\dot{\boldsymbol{\gamma}}_1,p_1,\boldsymbol{\sigma}_1, \boldsymbol{U}_1\} +O(\epsilon^{2}), \end{equation}
where  $\epsilon =1-\beta \ll 1$. The zeroth-order solution corresponds to the Newtonian flow, satisfying
$\epsilon =1-\beta \ll 1$. The zeroth-order solution corresponds to the Newtonian flow, satisfying  $\boldsymbol {\nabla }\boldsymbol {\cdot } \boldsymbol {\sigma }_0=\boldsymbol {0}$ and
$\boldsymbol {\nabla }\boldsymbol {\cdot } \boldsymbol {\sigma }_0=\boldsymbol {0}$ and  $\boldsymbol {\nabla }\boldsymbol {\cdot } \boldsymbol {u}_0=0$, where
$\boldsymbol {\nabla }\boldsymbol {\cdot } \boldsymbol {u}_0=0$, where  $\boldsymbol {\sigma }_0 = -p_0 {\boldsymbol{\mathsf{I}}} +\dot {\boldsymbol {\gamma }}_0$ is the Newtonian fluid stress. At
$\boldsymbol {\sigma }_0 = -p_0 {\boldsymbol{\mathsf{I}}} +\dot {\boldsymbol {\gamma }}_0$ is the Newtonian fluid stress. At  $O(\epsilon )$, the momentum and continuity equations are given by
$O(\epsilon )$, the momentum and continuity equations are given by
 \begin{equation} \boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{\sigma}_1 = \boldsymbol{0},\quad \boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{u}_1 = 0, \end{equation}
\begin{equation} \boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{\sigma}_1 = \boldsymbol{0},\quad \boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{u}_1 = 0, \end{equation}where the first non-Newtonian correction to the fluid stress reads
 \begin{equation} \boldsymbol{\sigma}_1 ={-}p_1 {\boldsymbol{\mathsf{I}}}+\dot{\boldsymbol{\gamma}}_1 + \boldsymbol{\mathsf{A}} \end{equation}
\begin{equation} \boldsymbol{\sigma}_1 ={-}p_1 {\boldsymbol{\mathsf{I}}}+\dot{\boldsymbol{\gamma}}_1 + \boldsymbol{\mathsf{A}} \end{equation}and
 \begin{equation} \boldsymbol{\mathsf{A}}=[{-}1+(1+Cu^{2}|\dot{\gamma}_0|^{2})^{(n-1)/2}] \dot{\boldsymbol{\gamma}}_0. \end{equation}
\begin{equation} \boldsymbol{\mathsf{A}}=[{-}1+(1+Cu^{2}|\dot{\gamma}_0|^{2})^{(n-1)/2}] \dot{\boldsymbol{\gamma}}_0. \end{equation} The goal here is to obtain the first non-Newtonian correction to the induced translational velocity  $\boldsymbol {U}_1$. We utilize the Lorentz reciprocal theorem (Lauga Reference Lauga2014; Elfring Reference Elfring2017; Masoud & Stone Reference Masoud and Stone2019) to calculate the velocity
$\boldsymbol {U}_1$. We utilize the Lorentz reciprocal theorem (Lauga Reference Lauga2014; Elfring Reference Elfring2017; Masoud & Stone Reference Masoud and Stone2019) to calculate the velocity  $\boldsymbol {U}_1$, bypassing calculations of the velocity and pressure fields at
$\boldsymbol {U}_1$, bypassing calculations of the velocity and pressure fields at  $O(\epsilon )$. As a remark, the reciprocal theorem is particularly useful for determining quantities such as the velocity of a particle and the force and torque on a particle. However, this integral approach does not provide detailed information such as the distribution of viscosity and the distribution of surface traction on a particle, which require calculations of the pressure and velocity fields.
$O(\epsilon )$. As a remark, the reciprocal theorem is particularly useful for determining quantities such as the velocity of a particle and the force and torque on a particle. However, this integral approach does not provide detailed information such as the distribution of viscosity and the distribution of surface traction on a particle, which require calculations of the pressure and velocity fields.
2.2. The reciprocal theorem
To apply the reciprocal theorem, we consider an auxiliary Stokes flow problem, whose flow field ( $\hat {\boldsymbol {u}}$) and fluid stress (
$\hat {\boldsymbol {u}}$) and fluid stress ( $\hat {\boldsymbol {\sigma }}$) satisfy
$\hat {\boldsymbol {\sigma }}$) satisfy
 \begin{equation} \boldsymbol{\nabla}\boldsymbol{\cdot} \hat{\boldsymbol{\sigma}} =\boldsymbol{0},\quad \boldsymbol{\nabla}\boldsymbol{\cdot} \hat{\boldsymbol{u}} =0, \end{equation}
\begin{equation} \boldsymbol{\nabla}\boldsymbol{\cdot} \hat{\boldsymbol{\sigma}} =\boldsymbol{0},\quad \boldsymbol{\nabla}\boldsymbol{\cdot} \hat{\boldsymbol{u}} =0, \end{equation}where
 \begin{equation} \hat{\boldsymbol{\sigma}} ={-}\hat{p} \boldsymbol{\mathsf{I}}+ \hat{\dot{\boldsymbol{\gamma}}} , \end{equation}
\begin{equation} \hat{\boldsymbol{\sigma}} ={-}\hat{p} \boldsymbol{\mathsf{I}}+ \hat{\dot{\boldsymbol{\gamma}}} , \end{equation}
and  $\hat {p}$ and
$\hat {p}$ and  $\hat {\dot {\boldsymbol {\gamma }}} = \boldsymbol {\nabla } \hat {\boldsymbol {u}}+(\boldsymbol {\nabla } \hat {\boldsymbol {u}})^{\textrm {T}}$ denote, respectively, the pressure and the strain-rate tensor in the auxiliary flow problem.
$\hat {\dot {\boldsymbol {\gamma }}} = \boldsymbol {\nabla } \hat {\boldsymbol {u}}+(\boldsymbol {\nabla } \hat {\boldsymbol {u}})^{\textrm {T}}$ denote, respectively, the pressure and the strain-rate tensor in the auxiliary flow problem.
Taking the inner product of the momentum equation in (2.5a) with  $\hat {\boldsymbol {u}}$ and the inner product of the momentum equation in (2.8a) with
$\hat {\boldsymbol {u}}$ and the inner product of the momentum equation in (2.8a) with  $\boldsymbol {u}_1$, we obtain the relation
$\boldsymbol {u}_1$, we obtain the relation
 \begin{equation} \hat{\boldsymbol{u}} \boldsymbol{\cdot}\boldsymbol{\nabla} \boldsymbol{\cdot} \boldsymbol{\sigma}_1 =\boldsymbol{u}_1 \boldsymbol{\cdot} \boldsymbol{\nabla}\boldsymbol{\cdot}\hat{\boldsymbol{\sigma}}. \end{equation}
\begin{equation} \hat{\boldsymbol{u}} \boldsymbol{\cdot}\boldsymbol{\nabla} \boldsymbol{\cdot} \boldsymbol{\sigma}_1 =\boldsymbol{u}_1 \boldsymbol{\cdot} \boldsymbol{\nabla}\boldsymbol{\cdot}\hat{\boldsymbol{\sigma}}. \end{equation}
We then integrate (2.10) over the fluid volume  $\mathcal {V}$ and employ the divergence theorem to obtain
$\mathcal {V}$ and employ the divergence theorem to obtain
 \begin{equation} \int_\mathcal{S}{\boldsymbol{n}\boldsymbol{\cdot}\hat{{\boldsymbol{\sigma}}} \boldsymbol{\cdot}{\boldsymbol{u}}_1}\,\text{d}\mathcal{S} - \int_\mathcal{S}{\boldsymbol{n}\boldsymbol{\cdot}{\boldsymbol{\sigma}}_1 \boldsymbol{\cdot}{\hat{\boldsymbol{u}}}}\,\text{d}\mathcal{S} =\int_\mathcal{V}{\boldsymbol{\sigma}_1 \,\boldsymbol{:}\, \boldsymbol{\nabla}\hat{\boldsymbol{u}}}\,\text{d}\mathcal{V} -\int_\mathcal{V}{\hat{\boldsymbol{\sigma}} \,\boldsymbol{:}\, \boldsymbol{\nabla}\boldsymbol{u}_1}\,\text{d}\mathcal{V}, \end{equation}
\begin{equation} \int_\mathcal{S}{\boldsymbol{n}\boldsymbol{\cdot}\hat{{\boldsymbol{\sigma}}} \boldsymbol{\cdot}{\boldsymbol{u}}_1}\,\text{d}\mathcal{S} - \int_\mathcal{S}{\boldsymbol{n}\boldsymbol{\cdot}{\boldsymbol{\sigma}}_1 \boldsymbol{\cdot}{\hat{\boldsymbol{u}}}}\,\text{d}\mathcal{S} =\int_\mathcal{V}{\boldsymbol{\sigma}_1 \,\boldsymbol{:}\, \boldsymbol{\nabla}\hat{\boldsymbol{u}}}\,\text{d}\mathcal{V} -\int_\mathcal{V}{\hat{\boldsymbol{\sigma}} \,\boldsymbol{:}\, \boldsymbol{\nabla}\boldsymbol{u}_1}\,\text{d}\mathcal{V}, \end{equation}
where  $\boldsymbol {n}$ is the unit normal vector on surface
$\boldsymbol {n}$ is the unit normal vector on surface  $\mathcal {S}$.
$\mathcal {S}$.
By substituting the fluid stress in the first-order problem given by (2.6) and that in the auxiliary flow problem given by (2.9) into the integrands on the right-hand side of (2.11), one can show that  $\boldsymbol {\sigma }_1 \,\boldsymbol {:}\, \boldsymbol {\nabla } \hat {\boldsymbol {u}} - \hat {\boldsymbol {\sigma }} \,\boldsymbol {:}\, \boldsymbol {\nabla } \boldsymbol {u}_1 = \boldsymbol{\mathsf{A}} \,\boldsymbol {:}\, \boldsymbol {\nabla } \hat {\boldsymbol {u}}$ due to the continuity equations (
$\boldsymbol {\sigma }_1 \,\boldsymbol {:}\, \boldsymbol {\nabla } \hat {\boldsymbol {u}} - \hat {\boldsymbol {\sigma }} \,\boldsymbol {:}\, \boldsymbol {\nabla } \boldsymbol {u}_1 = \boldsymbol{\mathsf{A}} \,\boldsymbol {:}\, \boldsymbol {\nabla } \hat {\boldsymbol {u}}$ due to the continuity equations ( $\boldsymbol {\nabla }\boldsymbol {\cdot } \hat {\boldsymbol {u}}=\boldsymbol {\nabla }\boldsymbol {\cdot } \boldsymbol {u}_1=0$) and symmetry (
$\boldsymbol {\nabla }\boldsymbol {\cdot } \hat {\boldsymbol {u}}=\boldsymbol {\nabla }\boldsymbol {\cdot } \boldsymbol {u}_1=0$) and symmetry ( $\dot {\boldsymbol {\gamma }}_1 \,\boldsymbol {:}\, \boldsymbol {\nabla } \hat {\boldsymbol {u}} = \hat {\dot {\boldsymbol {\gamma }}} \,\boldsymbol {:}\, \boldsymbol {\nabla } \boldsymbol {u}_1$). Moreover, suppose the particle in the auxiliary problem translates with velocity
$\dot {\boldsymbol {\gamma }}_1 \,\boldsymbol {:}\, \boldsymbol {\nabla } \hat {\boldsymbol {u}} = \hat {\dot {\boldsymbol {\gamma }}} \,\boldsymbol {:}\, \boldsymbol {\nabla } \boldsymbol {u}_1$). Moreover, suppose the particle in the auxiliary problem translates with velocity  $\hat {\boldsymbol {U}}$ without rotation, the integral relation (2.11) then becomes
$\hat {\boldsymbol {U}}$ without rotation, the integral relation (2.11) then becomes
 \begin{equation} \hat{\boldsymbol{F}}\boldsymbol{\cdot} \boldsymbol{U}_1 - \boldsymbol{F}_1 \boldsymbol{\cdot} \hat{\boldsymbol{U}} = \int_\mathcal{V} \boldsymbol{\mathsf{A}} \,\boldsymbol{:}\, \boldsymbol{\nabla} \hat{\boldsymbol{u}}\,\text{d}\mathcal{V}, \end{equation}
\begin{equation} \hat{\boldsymbol{F}}\boldsymbol{\cdot} \boldsymbol{U}_1 - \boldsymbol{F}_1 \boldsymbol{\cdot} \hat{\boldsymbol{U}} = \int_\mathcal{V} \boldsymbol{\mathsf{A}} \,\boldsymbol{:}\, \boldsymbol{\nabla} \hat{\boldsymbol{u}}\,\text{d}\mathcal{V}, \end{equation}
where  $\hat {\boldsymbol {F}} = \int _\mathcal {S}\boldsymbol {n} \boldsymbol {\cdot } \hat {{\boldsymbol {\sigma }}}\,\text {d}\mathcal {S}$ and
$\hat {\boldsymbol {F}} = \int _\mathcal {S}\boldsymbol {n} \boldsymbol {\cdot } \hat {{\boldsymbol {\sigma }}}\,\text {d}\mathcal {S}$ and  $\boldsymbol {F}_1=\int _\mathcal {S} \boldsymbol {n}\boldsymbol {\cdot }{\boldsymbol {\sigma }}_1 \,\text {d}\mathcal {S}$ denote, respectively, the force on the particle in the auxiliary and first-order problems. By enforcing the force-free condition (
$\boldsymbol {F}_1=\int _\mathcal {S} \boldsymbol {n}\boldsymbol {\cdot }{\boldsymbol {\sigma }}_1 \,\text {d}\mathcal {S}$ denote, respectively, the force on the particle in the auxiliary and first-order problems. By enforcing the force-free condition ( $\boldsymbol {F}_1 = \int _\mathcal {S} \boldsymbol {n}\boldsymbol {\cdot } \boldsymbol {\sigma }_1 \,\text {d}\mathcal {S} = \boldsymbol {0}$), one obtains the non-Newtonian correction to the induced translational velocity from the reciprocal theorem as
$\boldsymbol {F}_1 = \int _\mathcal {S} \boldsymbol {n}\boldsymbol {\cdot } \boldsymbol {\sigma }_1 \,\text {d}\mathcal {S} = \boldsymbol {0}$), one obtains the non-Newtonian correction to the induced translational velocity from the reciprocal theorem as
 \begin{equation} \hat{\boldsymbol{F}}\boldsymbol{\cdot} \boldsymbol{U}_1 = \int_\mathcal{V} \boldsymbol{\mathsf{A}} \,\boldsymbol{:}\, \boldsymbol{\nabla} \hat{\boldsymbol{u}} \, \text{d}\mathcal{V}. \end{equation}
\begin{equation} \hat{\boldsymbol{F}}\boldsymbol{\cdot} \boldsymbol{U}_1 = \int_\mathcal{V} \boldsymbol{\mathsf{A}} \,\boldsymbol{:}\, \boldsymbol{\nabla} \hat{\boldsymbol{u}} \, \text{d}\mathcal{V}. \end{equation}
Here, only known Newtonian solutions in the zeroth-order ( $\boldsymbol {u}_0$) and auxiliary flow (
$\boldsymbol {u}_0$) and auxiliary flow ( $\hat {\boldsymbol {u}}$) problems are required to determine the non-Newtonian correction to the speed,
$\hat {\boldsymbol {u}}$) problems are required to determine the non-Newtonian correction to the speed,  $\boldsymbol {U}_1$. We apply this integral theorem in 2-D and 3-D set-ups and discuss the results in §§ 3.1 and 3.2, respectively.
$\boldsymbol {U}_1$. We apply this integral theorem in 2-D and 3-D set-ups and discuss the results in §§ 3.1 and 3.2, respectively.
2.3. Numerical solution
To compare with the results from the asymptotic analysis, we also performed full numerical simulations of the momentum and continuity equations (2.1a,b) together with the Carreau constitutive equation (2.3) using the finite element method implemented in the COMSOL Multiphysics environment. A 2-D rectangular computational domain of size  $1000a \times 500a$ (in the
$1000a \times 500a$ (in the  $x$- and
$x$- and  $y$-directions, respectively) is used to simulate the dynamics of a rotating cylinder near a wall. For a rotating sphere near a wall, we take advantage of the symmetry about the
$y$-directions, respectively) is used to simulate the dynamics of a rotating cylinder near a wall. For a rotating sphere near a wall, we take advantage of the symmetry about the  $x$–
$x$– $y$ plane through the centre of the sphere and use a 3-D computational domain consisting of a rectangular prism of size
$y$ plane through the centre of the sphere and use a 3-D computational domain consisting of a rectangular prism of size  $250a\times (125a+h)\times 125a$ (in the
$250a\times (125a+h)\times 125a$ (in the  $x$-,
$x$-,  $y$- and
$y$- and  $z$-directions, respectively) to simulate only half of the full domain. A known angular velocity together with the unknown translational velocity are prescribed on the particle surface as the boundary condition.
$z$-directions, respectively) to simulate only half of the full domain. A known angular velocity together with the unknown translational velocity are prescribed on the particle surface as the boundary condition.
The momentum and continuity equations are solved simultaneously with the force-free condition to determine the induced translational velocity in different directions. Here, P2 + P1 (second order for fluid velocity and first order for pressure) triangular/tetrahedral mesh elements are used for the 2-D/3-D simulations, with local mesh refinement near the rotating cylinder/sphere. The degree of freedom is of the order of  $(1.2 - 2)\times 10^{6}$ for the 2-D simulations and
$(1.2 - 2)\times 10^{6}$ for the 2-D simulations and  $(3.5 - 6)\times 10^{6}$ for the 3-D simulations, depending on the distance of the cylinder/sphere from the wall. We use the Multifrontal Massively Parallel Sparse (MUMPS) direct solver for all simulations. In addition to comparing with the results from the asymptotic analysis, we validated the numerical implementation against analytical solutions in a Newtonian fluid in previous works (Dean & O'Neill Reference Dean and O'Neill1963; O'Neill Reference O'Neill1964, Reference O'Neill1967; Jeffrey & Onishi Reference Jeffrey and Onishi1981).
$(3.5 - 6)\times 10^{6}$ for the 3-D simulations, depending on the distance of the cylinder/sphere from the wall. We use the Multifrontal Massively Parallel Sparse (MUMPS) direct solver for all simulations. In addition to comparing with the results from the asymptotic analysis, we validated the numerical implementation against analytical solutions in a Newtonian fluid in previous works (Dean & O'Neill Reference Dean and O'Neill1963; O'Neill Reference O'Neill1964, Reference O'Neill1967; Jeffrey & Onishi Reference Jeffrey and Onishi1981).
3. Results and discussion
3.1. Two-dimensional problem
First, we revisit the surprising result that a rotating cylinder does not translate near a wall in the Stokes limit (Jeffrey & Onishi Reference Jeffrey and Onishi1981),  $\boldsymbol {U}_0=\boldsymbol {0}$, and calculate the leading-order translational velocity,
$\boldsymbol {U}_0=\boldsymbol {0}$, and calculate the leading-order translational velocity,  $\epsilon \boldsymbol {U}_1$, induced by shear-thinning rheology. We employ the result from the integral theorem (2.13) with two known exact Newtonian solutions by Jeffrey & Onishi (Reference Jeffrey and Onishi1981): the Stokes flow around a cylinder rotating near a plane wall,
$\epsilon \boldsymbol {U}_1$, induced by shear-thinning rheology. We employ the result from the integral theorem (2.13) with two known exact Newtonian solutions by Jeffrey & Onishi (Reference Jeffrey and Onishi1981): the Stokes flow around a cylinder rotating near a plane wall,  $\boldsymbol {u}_0$, and the Stokes flow around a cylinder translating parallel to wall in the auxiliary problem,
$\boldsymbol {u}_0$, and the Stokes flow around a cylinder translating parallel to wall in the auxiliary problem,  $\hat {\boldsymbol {u}}$. Substituting these flows into (2.13) and evaluating the integral numerically, we obtain the leading-order translational velocity parallel to the wall,
$\hat {\boldsymbol {u}}$. Substituting these flows into (2.13) and evaluating the integral numerically, we obtain the leading-order translational velocity parallel to the wall,  $\boldsymbol {U}=U\boldsymbol {e}_x \sim \epsilon U_1 \boldsymbol {e}_x$, as shown in figure 2(a). The asymptotic results (lines) agree well with results by numerical simulations (symbols) at different relative heights above the wall. Figure 2(b) compares the asymptotic and numerical results for a full range of
$\boldsymbol {U}=U\boldsymbol {e}_x \sim \epsilon U_1 \boldsymbol {e}_x$, as shown in figure 2(a). The asymptotic results (lines) agree well with results by numerical simulations (symbols) at different relative heights above the wall. Figure 2(b) compares the asymptotic and numerical results for a full range of  $\epsilon = 1-\beta$; the asymptotic result is still effective in capturing the qualitative behaviour with an intermediate value of
$\epsilon = 1-\beta$; the asymptotic result is still effective in capturing the qualitative behaviour with an intermediate value of  $\beta$ (inset).
$\beta$ (inset).

Figure 2. Wall-induced translation of a rotating cylinder in a shear-thinning fluid. (a) The induced translational velocity  $U$ (scaled by
$U$ (scaled by  $a\varOmega$) as a function of the Carreau number
$a\varOmega$) as a function of the Carreau number  $Cu$ for different distances
$Cu$ for different distances  $h$ (scaled by
$h$ (scaled by  $a$) from the wall. Asymptotic results via the reciprocal theorem (lines) agree well with results by full numerical simulations (symbols). The induced translation occurs in the backward mode (
$a$) from the wall. Asymptotic results via the reciprocal theorem (lines) agree well with results by full numerical simulations (symbols). The induced translation occurs in the backward mode ( $U<0$) in a shear-thinning fluid, opposite to what might be intuitively expected for an object rolling on a solid substrate. Here,
$U<0$) in a shear-thinning fluid, opposite to what might be intuitively expected for an object rolling on a solid substrate. Here,  $\beta =0.9$ and
$\beta =0.9$ and  $n=0.25$. (b) The translational velocity
$n=0.25$. (b) The translational velocity  $U$ as a function of
$U$ as a function of  $\epsilon =1-\beta$ with a distance
$\epsilon =1-\beta$ with a distance  $h=1.5$ from the wall. Inset:
$h=1.5$ from the wall. Inset:  $U$ as a function of
$U$ as a function of  $h$ with a viscosity ratio
$h$ with a viscosity ratio  $\beta =0.5$. Here,
$\beta =0.5$. Here,  $n=0.25$ and
$n=0.25$ and  $Cu=1$.
$Cu=1$.
From these results, first, unlike the Newtonian case, the shear-thinning rheology gives rise to a parallel (to the wall) translation of a rotating cylinder. Second, similar to the Newtonian case, numerical simulations found negligibly small induced translation normal to the wall, consistent with the asymptotic result via the reciprocal theorem using the Stokes flow around a cylinder translating normal to the wall (Jeffrey & Onishi Reference Jeffrey and Onishi1981) as the auxiliary problem. The absence of induced translation normal to the wall in a shear-thinning fluid is in contrast to the scenarios where other types of nonlinearities such as fluid elasticity, wall elasticity and inertial effects are present (Leal Reference Leal1980; Wang & Joseph Reference Wang and Joseph2003; Daddi-Moussa-Ider et al. Reference Daddi-Moussa-Ider, Rallabandi, Gekle and Stone2018b; Fang et al. Reference Fang, Ham, Qiao and Tao2020). Third, our results reveal an interesting feature that the induced translation occurs in the negative  $x$-direction (referred to as the backward mode in this work), opposite to what might be intuitively expected for an object rolling along a solid surface.
$x$-direction (referred to as the backward mode in this work), opposite to what might be intuitively expected for an object rolling along a solid surface.
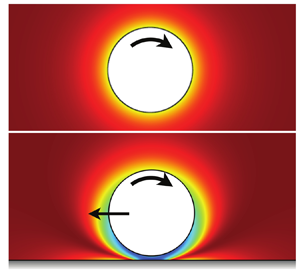
To develop some understanding of these results, we examine the viscosity distribution around the rotating cylinder, when it is not free to translate. Under this set-up we analyse the hydrodynamic force on the rotating cylinder and probe any resulting force imbalance that drives a translation. As a reference, in an unbounded domain, the rotational motion of the cylinder reduces the fluid viscosity symmetrically around the cylinder (figure 3(a), top panel). The presence of the wall breaks the up–down symmetry and causes higher velocity gradients in the fluid gap below the cylinder than in the fluid above it. When the fluid is shear-thinning, although the viscosity around the cylinder decreases generally, the viscosity in the fluid gap is reduced to a greater extent due to higher velocity gradients, as shown in the bottom panel of figure 3(a). The less viscous fluid below the cylinder therefore leads to a weaker hydrodynamic force on the lower half of the cylinder ( $F_\ell$; acting to the right) compared with the force on the upper half (
$F_\ell$; acting to the right) compared with the force on the upper half ( $F_u$; acting to the left), as shown in figure 3(b) for different
$F_u$; acting to the left), as shown in figure 3(b) for different  $Cu$. The force imbalance (
$Cu$. The force imbalance ( $F_\ell < F_u$; net force acting to the left) thus drives the rotating cylinder to translate to the left in the backward mode.
$F_\ell < F_u$; net force acting to the left) thus drives the rotating cylinder to translate to the left in the backward mode.

Figure 3. (a) Viscosity map ( $\eta /\eta _0$) around a rotating cylinder in an unbounded (top panel) and wall-bounded (bottom panel) domains, when the cylinder is not free to translate. In an unbounded domain, the hydrodynamic force on the upper (open triangles,
$\eta /\eta _0$) around a rotating cylinder in an unbounded (top panel) and wall-bounded (bottom panel) domains, when the cylinder is not free to translate. In an unbounded domain, the hydrodynamic force on the upper (open triangles,  $F_u$) and lower (filled triangles,
$F_u$) and lower (filled triangles,  $F_\ell$) half of the cylinder are equal in magnitude in a shear-thinning fluid as shown in (b). The combined effect of shear-thinning viscosity and symmetry breaking by the wall induces a weaker hydrodynamic force on the lower half of the cylinder (filled circles) than that on the upper half (open circles) for different values of
$F_\ell$) half of the cylinder are equal in magnitude in a shear-thinning fluid as shown in (b). The combined effect of shear-thinning viscosity and symmetry breaking by the wall induces a weaker hydrodynamic force on the lower half of the cylinder (filled circles) than that on the upper half (open circles) for different values of  $Cu$. The viscosity maps shown in (a) correspond to the case
$Cu$. The viscosity maps shown in (a) correspond to the case  $Cu=0.8$, around which the maximum translational speed occurs for a rotating cylinder at a distance
$Cu=0.8$, around which the maximum translational speed occurs for a rotating cylinder at a distance  $h=1.1$ from the wall. In (b), forces are scaled by
$h=1.1$ from the wall. In (b), forces are scaled by  $\eta _0a^{2}\varOmega$. The force imbalance on the cylinder drives it to translate in the backward mode. Inset: the force on the upper (open circles) and lower (filled circles) half of the cylinder as a function of
$\eta _0a^{2}\varOmega$. The force imbalance on the cylinder drives it to translate in the backward mode. Inset: the force on the upper (open circles) and lower (filled circles) half of the cylinder as a function of  $1-\beta$. Here, in both panels,
$1-\beta$. Here, in both panels,  $\beta =0.9$ (except for the inset) and
$\beta =0.9$ (except for the inset) and  $n=0.25$.
$n=0.25$.
We note that the broken spatial symmetry due to the wall alone is insufficient to generate the asymmetric forces in a Newtonian fluid ( $F_\ell = F_u$ when
$F_\ell = F_u$ when  $Cu = 0$). The emergence of induced translation in two dimensions thus requires the combined presence of shear-thinning effect and spatial symmetry breaking. At an exceedingly large
$Cu = 0$). The emergence of induced translation in two dimensions thus requires the combined presence of shear-thinning effect and spatial symmetry breaking. At an exceedingly large  $Cu$, the fluid is largely shear-thinned and the rotating cylinder is surrounded by a virtually Newtonian fluid with the infinite-shear-rate viscosity,
$Cu$, the fluid is largely shear-thinned and the rotating cylinder is surrounded by a virtually Newtonian fluid with the infinite-shear-rate viscosity,  $\eta _\infty$; the asymmetry in force therefore decays, inducing vanishingly small translation when
$\eta _\infty$; the asymmetry in force therefore decays, inducing vanishingly small translation when  $Cu \gg 1$.
$Cu \gg 1$.
3.2. Three-dimensional problem
In contrast to the 2-D case, in three dimensions a rotating sphere translates parallel to the wall even in a Newtonian fluid,  $\boldsymbol {U}_0= U_0 \boldsymbol {e}_x$ with
$\boldsymbol {U}_0= U_0 \boldsymbol {e}_x$ with  $U_0>0$, in a direction consistent with the rolling of a sphere along the wall (the forward mode). The Newtonian translational velocity can be obtained based on analytical results obtained by O'Neill (Reference O'Neill1964, Reference O'Neill1967) and Dean & O'Neill (Reference Dean and O'Neill1963). Here, we determine how shear-thinning rheology impacts the wall-induced translation of a rotating sphere.
$U_0>0$, in a direction consistent with the rolling of a sphere along the wall (the forward mode). The Newtonian translational velocity can be obtained based on analytical results obtained by O'Neill (Reference O'Neill1964, Reference O'Neill1967) and Dean & O'Neill (Reference Dean and O'Neill1963). Here, we determine how shear-thinning rheology impacts the wall-induced translation of a rotating sphere.
Similar to the 2-D analysis, we obtain the non-Newtonian correction  $\boldsymbol {U}_1 = U_1 \boldsymbol {e}_x$ via the reciprocal theorem (2.13) but with two different Newtonian solutions: we use the Stokes flows around a sphere rotating (Dean & O'Neill Reference Dean and O'Neill1963) and translating (O'Neill Reference O'Neill1964, Reference O'Neill1967) near a plane wall, respectively, for
$\boldsymbol {U}_1 = U_1 \boldsymbol {e}_x$ via the reciprocal theorem (2.13) but with two different Newtonian solutions: we use the Stokes flows around a sphere rotating (Dean & O'Neill Reference Dean and O'Neill1963) and translating (O'Neill Reference O'Neill1964, Reference O'Neill1967) near a plane wall, respectively, for  $\boldsymbol {u}_0$ and
$\boldsymbol {u}_0$ and  $\hat {\boldsymbol {u}}$ in (2.13). In figure 4(a), the results from the asymptotic analysis (lines) and numerical simulations (symbols) agree well in the weakly non-Newtonian regime with a viscosity ratio
$\hat {\boldsymbol {u}}$ in (2.13). In figure 4(a), the results from the asymptotic analysis (lines) and numerical simulations (symbols) agree well in the weakly non-Newtonian regime with a viscosity ratio  $\beta =0.9$. The induced translation still occurs in the forward mode for varying
$\beta =0.9$. The induced translation still occurs in the forward mode for varying  $Cu$. The shear-thinning effect, which drives a rotating cylinder to translate in the backward mode, acts only to reduce the translational speed of a rotating sphere in the forward mode in this weakly nonlinear regime. We attribute the speed reduction observed here to the same physical mechanism explained in the 2-D case: compared with the Newtonian velocity (
$Cu$. The shear-thinning effect, which drives a rotating cylinder to translate in the backward mode, acts only to reduce the translational speed of a rotating sphere in the forward mode in this weakly nonlinear regime. We attribute the speed reduction observed here to the same physical mechanism explained in the 2-D case: compared with the Newtonian velocity ( $U_0>0$), the non-Newtonian contribution acts in the opposite direction (
$U_0>0$), the non-Newtonian contribution acts in the opposite direction ( $\epsilon U_1<0$) but with a smaller magnitude in this weakly non-Newtonian regime (
$\epsilon U_1<0$) but with a smaller magnitude in this weakly non-Newtonian regime ( $\epsilon \ll 1$), causing only a speed reduction without directional change. This leads to the hypothesis that a sufficiently strong shear-thinning effect could offset the Newtonian speed and ultimately drive the rotating sphere to translate in the backward mode similar to the 2-D case. Both asymptotic and numerical results in figure 4(b) show that backward translation can indeed occur for larger values of
$\epsilon \ll 1$), causing only a speed reduction without directional change. This leads to the hypothesis that a sufficiently strong shear-thinning effect could offset the Newtonian speed and ultimately drive the rotating sphere to translate in the backward mode similar to the 2-D case. Both asymptotic and numerical results in figure 4(b) show that backward translation can indeed occur for larger values of  $\epsilon$.
$\epsilon$.

Figure 4. Wall-induced translation of a rotating sphere in a shear-thinning fluid. (a) The induced translational velocity U (scaled by  $a\varOmega$) as a function of
$a\varOmega$) as a function of  $Cu$ for different distances
$Cu$ for different distances  $h$ (scaled by
$h$ (scaled by  $a$) from the wall. The rotating sphere translates in the forward mode (
$a$) from the wall. The rotating sphere translates in the forward mode ( $U>0$) in this weakly non-Newtonian regime with a viscosity ratio
$U>0$) in this weakly non-Newtonian regime with a viscosity ratio  $\beta =0.9$. Here,
$\beta =0.9$. Here,  $n=0.25$. (b) The translational velocity
$n=0.25$. (b) The translational velocity  $U$ as a function of
$U$ as a function of  $\epsilon =1-\beta$ with a distance
$\epsilon =1-\beta$ with a distance  $h=1.5$ from the wall. Asymptotic and numerical results agree well when
$h=1.5$ from the wall. Asymptotic and numerical results agree well when  $\epsilon$ is relatively small. Inset:
$\epsilon$ is relatively small. Inset:  $U$ as a function of
$U$ as a function of  $h$ with a viscosity ratio
$h$ with a viscosity ratio  $\beta =0.5$. Here,
$\beta =0.5$. Here,  $n=0.25$ and
$n=0.25$ and  $Cu=1$.
$Cu=1$.
We use numerical simulations to further probe the behaviour beyond the weakly non-Newtonian regime in figure 5. As shown in figure 5(a), when the shear-thinning effect is more substantial ( $\beta = 0.1$), the rotating sphere can switch from translating in the forward mode to the backward mode beyond a critical value of
$\beta = 0.1$), the rotating sphere can switch from translating in the forward mode to the backward mode beyond a critical value of  $Cu$, depending on the height
$Cu$, depending on the height  $h$ above the wall. It is also noteworthy that the maximum backward speed occurring at the optimal
$h$ above the wall. It is also noteworthy that the maximum backward speed occurring at the optimal  $Cu$ can be comparable to (e.g. when
$Cu$ can be comparable to (e.g. when  $h=1.1$) or even greater than the forward speed in the Newtonian limit (e.g. when
$h=1.1$) or even greater than the forward speed in the Newtonian limit (e.g. when  $h=1.5$ and
$h=1.5$ and  $h=2$). When
$h=2$). When  $Cu$ becomes exceedingly large, the Newtonian behaviour is recovered and the rotating sphere returns to translate in the forward mode. Figure 5(b) indicates the direction of induced translation for different values of
$Cu$ becomes exceedingly large, the Newtonian behaviour is recovered and the rotating sphere returns to translate in the forward mode. Figure 5(b) indicates the direction of induced translation for different values of  $Cu$ and
$Cu$ and  $\beta$. We remark that, similar to the 2-D case, there is no translation normal to the wall in both Newtonian and shear-thinning fluids.
$\beta$. We remark that, similar to the 2-D case, there is no translation normal to the wall in both Newtonian and shear-thinning fluids.

Figure 5. (a) The induced translational velocity  $U$ of a rotating sphere as a function of
$U$ of a rotating sphere as a function of  $Cu$ for different distances
$Cu$ for different distances  $h$, when the shear-thinning effect is more substantial with a viscosity ratio
$h$, when the shear-thinning effect is more substantial with a viscosity ratio  $\beta =0.1$. The rotating sphere can translate either forward (
$\beta =0.1$. The rotating sphere can translate either forward ( $U>0$) or backward (
$U>0$) or backward ( $U<0$) depending on the value of
$U<0$) depending on the value of  $Cu$. (b) The direction of induced translation (forward or backward) is indicated for different values of
$Cu$. (b) The direction of induced translation (forward or backward) is indicated for different values of  $Cu$ and
$Cu$ and  $\beta$ for a rotating sphere at a distance
$\beta$ for a rotating sphere at a distance  $h=1.5$ from the wall. Here,
$h=1.5$ from the wall. Here,  $n=0.25$.
$n=0.25$.
Based on our results, we provide an estimate of the magnitude of translational speed induced by this new mechanism in a typical experimental set-up with microrollers (Driscoll et al. Reference Driscoll, Delmotte, Youssef, Sacanna, Donev and Chaikin2017). Consider a spherical microroller of radius  $a=0.66\ \mathrm {\mu }\text {m}$ rotating with
$a=0.66\ \mathrm {\mu }\text {m}$ rotating with  $\varOmega = 100$ s
$\varOmega = 100$ s $^{-1}$ at a height
$^{-1}$ at a height  $h= 1.0\ \mathrm {\mu }\text {m}$ above the wall. With a relative height of
$h= 1.0\ \mathrm {\mu }\text {m}$ above the wall. With a relative height of  $h/a\approx 1.5$, from figure 5(a) we estimate a Newtonian (
$h/a\approx 1.5$, from figure 5(a) we estimate a Newtonian ( $Cu=0$) forward translational speed,
$Cu=0$) forward translational speed,  $U/a\varOmega \approx 0.014$ or
$U/a\varOmega \approx 0.014$ or  $U \approx 1\ \mathrm {\mu }$m s
$U \approx 1\ \mathrm {\mu }$m s $^{-1}$, consistent with the order of magnitude in previous measurements in a Newtonian fluid (Driscoll et al. Reference Driscoll, Delmotte, Youssef, Sacanna, Donev and Chaikin2017). The corresponding speed in a shear-thinning fluid depends on specific fluid properties. The shear-thinning time scale
$^{-1}$, consistent with the order of magnitude in previous measurements in a Newtonian fluid (Driscoll et al. Reference Driscoll, Delmotte, Youssef, Sacanna, Donev and Chaikin2017). The corresponding speed in a shear-thinning fluid depends on specific fluid properties. The shear-thinning time scale  $\lambda$ of biological fluids can range from a tenth of a second to seconds for blood (Cho & Kensey Reference Cho and Kensey1991; Gijsen et al. Reference Gijsen, van de Vosse and Janssen1999) or higher for different mucus (Li et al. Reference Li, Luo, Chin, Hill, Johnson and Bird2008; Vélez-Cordero & Lauga Reference Vélez-Cordero and Lauga2013); dilute aqueous solutions of xanthan gum (100–1000 p.p.m.) have
$\lambda$ of biological fluids can range from a tenth of a second to seconds for blood (Cho & Kensey Reference Cho and Kensey1991; Gijsen et al. Reference Gijsen, van de Vosse and Janssen1999) or higher for different mucus (Li et al. Reference Li, Luo, Chin, Hill, Johnson and Bird2008; Vélez-Cordero & Lauga Reference Vélez-Cordero and Lauga2013); dilute aqueous solutions of xanthan gum (100–1000 p.p.m.) have  $\lambda$ of the order of seconds (Gagnon et al. Reference Gagnon, Keim and Arratia2014). Taking
$\lambda$ of the order of seconds (Gagnon et al. Reference Gagnon, Keim and Arratia2014). Taking  $\lambda = 1\ \text {s}$, we have
$\lambda = 1\ \text {s}$, we have  $Cu=\lambda \varOmega =100$, which leads to a backward propulsion velocity,
$Cu=\lambda \varOmega =100$, which leads to a backward propulsion velocity,  $U/a\varOmega \approx - 0.025$ or
$U/a\varOmega \approx - 0.025$ or  $U \approx - 1.65\ \mathrm {\mu }$m s
$U \approx - 1.65\ \mathrm {\mu }$m s $^{-1}$ (even faster than the Newtonian speed) from figure 5(a). We therefore expect the backward speed to be considerable and call for subsequent experimental investigations.
$^{-1}$ (even faster than the Newtonian speed) from figure 5(a). We therefore expect the backward speed to be considerable and call for subsequent experimental investigations.
We also remark on the connection between the physical mechanism in the present work and those underlying the peculiar motion of a rotating sphere near a plane fluid interface in a Newtonian fluid (Lee, Chadwick & Leal Reference Lee, Chadwick and Leal1979; Lee & Leal Reference Lee and Leal1980). In the latter case, the existence of a substantial slip velocity on the fluid interface acts to reduce the velocity gradients and hence stresses on the side of the sphere closer to the interface. Such a mechanism can also cause the rotating sphere to translate in the backward mode. In this work we report a new mechanism of a distinct physical origin (non-Newtonian in nature) that can cause a similar backward translation but without requiring the presence of a fluid interface.
Finally, we suggest a potential implication of the current mechanism on the near-wall motion of swimming bacteria. Swimmer–surface interactions are known to cause clockwise circular motion of bacteria above a solid wall (Lauga et al. Reference Lauga, DiLuzio, Whitesides and Stone2006) but anticlockwise motion below a free surface (Lemelle et al. Reference Lemelle, Palierne, Chatre and Place2010; Di Leonardo et al. Reference Di Leonardo, Dell'Arciprete, Angelani and Iebba2011); more recently, anticlockwise motion was also observed in complex fluids and interfaces (Lemelle et al. Reference Lemelle, Palierne, Chatre, Vaillant and Place2013; Morse et al. Reference Morse, Huang, Li, Maxey and Tang2013; Lopez & Lauga Reference Lopez and Lauga2014). In addition, sign reversal in the self-mobilities and pair mobilities can occur for particles near elastic membranes (Daddi-Moussa-Ider et al. Reference Daddi-Moussa-Ider, Lisicki, Gekle, Menzel and Löwen2018a), which was also shown to have interesting implications on the direction of circular swimming (Daddi-Moussa-Ider et al. Reference Daddi-Moussa-Ider, Kurzthaler, Hoell, Zöttl, Mirzakhanloo, Alam, Menzel, Löwen and Gekle2019).
The present work suggests another plausible mechanism that may change the direction of circular motion: the modified translation–rotation coupling due to shear-thinning rheology could, in principle, flip the direction of the wall-induced force couple on the rotating flagella and the counter-rotating cell body, thereby causing also anticlockwise circular motion even above a solid wall. Indeed, the bidirectionality of the translation–rotation coupling and its dependence on  $Cu$ as shown in figure 5 allow a bacterium (or a similar artificial microswimmer) to undergo circular motion in either direction in a shear-thinning fluid by adjusting the rotational frequency. As a remark, in addition to the direction of circular motion, the shear-thinning effect may affect the bacterial swimming speed near a wall. Subsequent studies on the detailed near-wall dynamics of swimming bacteria in a shear-thinning fluid and its connection to the measurement of bacterial motor torque (Giacché, Ishikawa & Yamaguchi Reference Giacché, Ishikawa and Yamaguchi2010; Das & Lauga Reference Das and Lauga2018) could be interesting directions for future work.
$Cu$ as shown in figure 5 allow a bacterium (or a similar artificial microswimmer) to undergo circular motion in either direction in a shear-thinning fluid by adjusting the rotational frequency. As a remark, in addition to the direction of circular motion, the shear-thinning effect may affect the bacterial swimming speed near a wall. Subsequent studies on the detailed near-wall dynamics of swimming bacteria in a shear-thinning fluid and its connection to the measurement of bacterial motor torque (Giacché, Ishikawa & Yamaguchi Reference Giacché, Ishikawa and Yamaguchi2010; Das & Lauga Reference Das and Lauga2018) could be interesting directions for future work.
4. Conclusion
In this work, we uncover a new physical mechanism that leads to somewhat counterintuitive behaviours of a rotating particle near a wall. In two dimensions, the shear-thinning effect causes a rotating cylinder always to translate in a direction opposite to what might be intuitively expected for an object rolling on the wall. In three dimensions, a rotating sphere may propel either forwards or backwards depending on its rotational frequency and properties of the shear-thinning fluid. Knowledge here is crucial in guiding the choice of rotational frequency of a microroller in order for it to propel effectively in the desired direction when used as a micro-propelling device. This non-Newtonian behaviour also enables more complex manoeuvres of microrollers such as bidirectional translation by simply varying the rotational frequency, without switching the direction of the external actuation field. We also discuss a potential implication of the modified translation–rotation coupling on the circular motion of swimming bacteria near a wall in complex fluids.
Taken together, we expect the present work to not only open up possibilities of more sophisticated manoeuvres of micromachines but also spur further interests in its implications on cell locomotion as well as the control of collective motion of active particles under confinement (Bricard et al. Reference Bricard, Caussin, Das, Savoie, Chikkadi, Shitara, Chepizhko, Peruani, Saintillan and Bartolo2015; Driscoll et al. Reference Driscoll, Delmotte, Youssef, Sacanna, Donev and Chaikin2017) in complex fluids.
Funding
We acknowledge the National Science Foundation for funding support under CBET-1931292 (to O.S.P.), CBET-1931214 (to W.G.) and DMS-1951600 (to Y.-N.Y.). Y.-N.Y. also acknowledges support from Flatiron Institute, part of Simons Foundation. Computational resources from the WAVE computing facility (enabled by the E.L. Wiegand Foundation) at Santa Clara University are also gratefully acknowledged.
Declaration of interests
The authors report no conflict of interest.


































































 Open access
Open access