


1. Introduction
The psychology of human vision has a long research history. Classic studies in color perception (Young, Reference Young1802), object recognition (Lissauer, Reference Lissauer1890), and perceptual organization (Wertheimer, Reference Wertheimer1912) date back well over 100 years, and there are now large and rich literatures in cognitive psychology, neuropsychology, and psychophysics exploring a wide range of high- and low-level visual capacities, from visual reasoning on the one hand to subtle perceptual discriminations on the other. Along with rich datasets there are theories and computational models of various aspects of vision, including object recognition (e.g., Biederman, Reference Biederman1987; Cao, Grossberg, & Markowitz, Reference Cao, Grossberg and Markowitz2011; Erdogan & Jacobs, Reference Erdogan and Jacobs2017; Hummel & Biederman, Reference Hummel and Biederman1992; Marr, Reference Marr1982; Ullman & Basri, Reference Ullman and Basri1991; for reviews see Gauthier & Tarr, Reference Gauthier and Tarr2016; Hummel, Reference Hummel and Reisburg2013). However, one notable feature of psychological models of vision is that they typically do not solve many engineering challenges. For example, the models developed in psychology cannot identify naturalistic images of objects.
By contrast, deep neural networks (DNNs) first developed in computer science have had extraordinary success in classifying naturalistic images and now exceed human performance on some object recognition benchmarks. For example, the ImageNet Large-Scale Visual Recognition Challenge was an annual competition that assessed how well models could classify images into one of a thousand categories of objects taken from a dataset of over 1 million photographs. The competition ended in 2017 when 29 of 38 competing teams had greater than 95% accuracy, matching or surpassing human performance on the same dataset. These successes have raised questions as to whether the models work like human vision, with many researchers highlighting the similarity between the two systems, and some claiming that DNNs are currently the best models of human visual object processing (e.g., Kubilius et al., Reference Kubilius, Schrimpf, Kar, Hong, Majaj, Rajalingham and DiCarlo2019; Mehrer, Spoerer, Jones, Kriegeskorte, & Kietzmann, Reference Mehrer, Spoerer, Jones, Kriegeskorte and Kietzmann2021; Zhuang et al., Reference Zhuang, Yan, Nayebi, Schrimpf, Frank, DiCarlo and Yamins2021).
Strikingly, however, claims regarding the similarity of DNNs to human vision are made with little or no reference to the rich body of empirical data on human visual perception. Indeed, researchers in psychology and computer science often adopt very different criteria for assessing models of human vision. Here we highlight how the common failure to consider the vast set of findings and methods from psychology has impeded progress in developing human-like models of vision. It has also led to researchers making far too strong claims regarding the successes of DNNs in modeling human object recognition. In fact, current deep network models account for almost no findings reported in psychology. In our view, a plausible model of human object recognition must minimally account for the core properties of human vision.
The article is organized as follows. First, we review and criticize the main sources of evidence that have been used to support the claim that DNNs are the best models of human object recognition, namely, their success in predicting the data from a set of behavioral and brain studies. We show that good performance on these datasets is obtained by models that bear little relation to human vision. Second, we question a core theoretical assumption that motivates much of this research program, namely, the hypothesis that the human visual system has been optimized to classify objects. Third, we assess how well DNNs account for a wide range of psychological findings in vision. In almost all cases these studies highlight profound discrepancies between DNNs and humans. Fourth, we briefly note how similar issues apply to other domains in which DNNs are compared to humans. Fifth, we briefly outline more promising modeling agendas before concluding.
We draw two general conclusions. First, current DNNs are not good (let alone the best) models of human object recognition. Apart from the fact that DNNs account for almost no findings from psychology, researchers rarely consider alternative theories and models that do account for many key experimental results. Second, we argue that researchers interested in developing human-like DNN models of object recognition should focus on accounting for key experimental results reported in psychology rather than the current focus on predictions that drive so much current research.
2. The problem with benchmarks
It is frequently claimed that DNNs are the best models of the human visual system, with quotes like:
Deep convolutional artificial neural networks (ANNs) are the leading class of candidate models of the mechanisms of visual processing in the primate ventral stream. Kubilius et al. (Reference Kubilius, Schrimpf, Kar, Hong, Majaj, Rajalingham and DiCarlo2019)
Deep neural networks provide the current best models of visual information processing in the primate brain. (Mehrer et al., Reference Mehrer, Spoerer, Jones, Kriegeskorte and Kietzmann2021)
Primates show remarkable ability to recognize objects. This ability is achieved by their ventral visual stream, multiple hierarchically interconnected brain areas. The best quantitative models of these areas are deep neural networks…. (Zhuang et al., Reference Zhuang, Yan, Nayebi, Schrimpf, Frank, DiCarlo and Yamins2021)
Deep neural networks (DNNs) trained on object recognition provide the best current models of high-level visual areas in the brain…. (Storrs, Kietzmann, Walther, Mehrer, & Kriegeskorte, Reference Storrs, Kietzmann, Walther, Mehrer and Kriegeskorte2021)
Relatedly, DNNs are claimed to provide important insights into how humans identify objects:
Recently, specific feed-forward deep convolutional artificial neural networks (ANNs) models have dramatically advanced our quantitative understanding of the neural mechanisms underlying primate core object recognition. (Rajalingham et al., Reference Rajalingham, Issa, Bashivan, Kar, Schmidt and DiCarlo2018)
And more generally:
Many recent findings suggest that deep learning can inform our theories of the brain…many well-known behavioral and neurophysiological phenomena, including… visual illusions and apparent model-based reasoning, have been shown to emerge in deep ANNs trained on tasks similar to those solved by animals. (Richards et al., Reference Richards, Lillicrap, Beaudoin, Bengio, Bogacz, Christensen and Kording2019)
AI is now increasingly being employed as a tool for neuroscience research and is transforming our understanding of brain functions. In particular, deep learning has been used to model how convolutional layers and recurrent connections in the brain's cerebral cortex control important functions, including visual processing, memory, and motor control. (Macpherson et al., Reference Macpherson, Churchland, Sejnowski, DiCarlo, Kamitani, Takahashi and Hikida2021)
Of course, these same authors also note that DNNs are still far from perfect models of human vision and object recognition, but it is the correspondences that are emphasized and that receive all the attention.
The claim that DNNs are the best models of human object recognition is largely justified based on three sets of findings, namely, (1) DNNs are more accurate than any other model in classifying images taken from various datasets, (2) DNNs do the best job in predicting the pattern of human errors in classifying objects taken from various behavioral studies, and (3) DNNs do the best job in predicting brain recordings (e.g., single-cell responses or fMRI blood-oxygen-level-dependent [BOLD] signals) in response to images taken from various studies. According to this research program, all else being equal, the better the models perform on the behavioral and brain datasets, the closer their correspondence with human vision. This is nicely summarized by Schrimpf et al. (Reference Schrimpf, Kubilius, Hong, Majaj, Rajalingham, Issa and DiCarlo2020a) when describing their benchmark dataset: “Brain-Score – a composite of multiple neural and behavioral benchmarks that score any [artificial neural network] on how similar it is to the brain's mechanisms for core object recognition” (p. 1).
A key feature of these behavioral and brain studies is that they assess how well DNNs predict behavioral and brain responses to stimuli that vary along multiple dimensions (e.g., image category, size, color, texture, orientation, etc.) and there is no attempt to test specific hypotheses regarding what features are contributing to good predictions. Rather, models are assessed and compared in terms of their predictions on these datasets after averaging over all forms of stimulus variation. Due to lack of a better name, we will use the term prediction-based experiments to describe this method. This contrasts with controlled experiments in which the researcher tests hypotheses about the natural world by selectively manipulating independent variables and comparing the results across conditions to draw conclusions. In the case of studying human vision, this will often take the form of manipulating the images to test a specific hypothesis. For instance, a researcher might compare how well participants identify photographs versus line drawings of the same objects under the same viewing conditions to assess the role of shape versus texture/color in object identification (see sect. 4.2.3).
To illustrate the prediction-based nature of these studies, consider the image dataset from Kiani, Esteky, Mirpour, and Tanaka (Reference Kiani, Esteky, Mirpour and Tanaka2007) used by Khaligh-Razavi and Kriegeskorte (Reference Khaligh-Razavi and Kriegeskorte2014) to assess how well DNNs can predict single-cell responses in macaques and fMRI BOLD signals in humans using representational similarity analysis (RSA). This dataset includes objects from six categories (see Fig. 1) that vary in multiple ways from one another (both within and between categories) and the objects often contain multiple different visual features diagnostic of their category (e.g., faces not only share shape they tend to share color and texture). Critical for present purposes, there is no manipulation of the images to test which visual features are used for object recognition in DNNs, humans, or macaques, and what visual features DNNs use to support good predictions on the behavioral and brain datasets. Instead, models receive an overall RSA score that is used to make inferences regarding the similarity of DNNs to the human (or macaque) visual object recognition system.
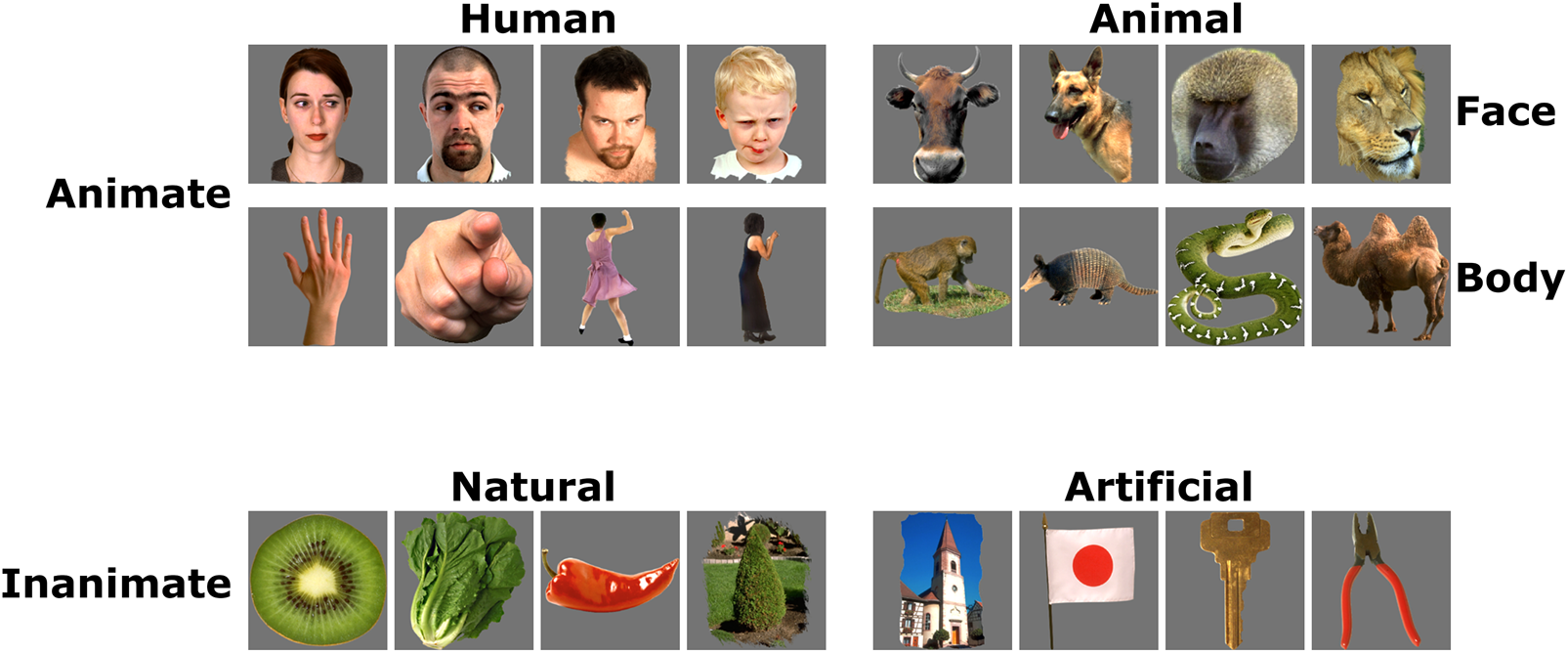
Figure 1. Example images from Kiani et al. (Reference Kiani, Esteky, Mirpour and Tanaka2007) that include images from six categories.
Or consider the Brain-Score benchmark that includes a range of behavioral and brain studies that together are used to rate a model's similarity to human object recognition (Schrimpf et al., Reference Schrimpf, Kubilius, Hong, Majaj, Rajalingham, Issa and DiCarlo2020a, Reference Schrimpf, Kubilius, Lee, Murty, Ajemian and DiCarlo2020b). Currently five studies are used to assess how well DNNs predict brain activation in inferotemporal (IT) cortex. The first of these (Majaj, Hong, Solomon, & DiCarlo, Reference Majaj, Hong, Solomon and DiCarlo2015) recorded from neurons from two awake behaving rhesus macaques who viewed thousands of images when objects were placed on unrelated backgrounds with the size, position, and orientation of the objects systematically varied to generate a large dataset of images. See Figure 2 for some example images. Despite the manipulation of size, position, and orientation of the images, Brain-Score collapses over these factors, and each model receives a single number that characterizes how well they predict the neural responses across all test images. Accordingly, Brain-Score does not test any hypothesis regarding how size, position, or orientation are encoded in DNNs or humans. The other four studies that test DNN–IT correspondences used similar datasets, and again, Brain-Score averaged across all test images when generating predictions.

Figure 2. Example images of cars, fruits, and animals at various poses with random backgrounds from Majaj et al. (Reference Majaj, Hong, Solomon and DiCarlo2015).
Similarly, consider the two studies in Brain-Score that assess how well DNNs predict behavior in humans and macaques. The first used objects displayed in various poses and randomly assigned backgrounds (similar to Fig. 2; Rajalingham, Schmidt, & DiCarlo, Reference Rajalingham, Schmidt and DiCarlo2015), but again, predictions were made after collapsing over the various poses. The second study was carried out by Geirhos et al. (Reference Geirhos, Narayanappa, Mitzkus, Thieringer, Bethge, Wichmann and Brendel2021) who systematically varied images across multiple conditions to test various hypotheses regarding how DNNs classify objects. For example, in one comparison, objects were presented as photographs or as line drawings to assess the role of shape in classifying objects (see sect. 4.2.3). However, in Brain-Score, the performance of models is again averaged across all conditions such that the impact of specific manipulations is lost.Footnote 1 In sum, in all current prediction-based experiments, models are assessed in how well they predict overall performance, with the assumption that the higher the prediction, the better the DNN–human (macaque) correspondence. On this approach, there is no attempt to assess the impact of any specific image manipulation, even when the original experiments specifically manipulated independent variables to test hypotheses.
This is not to say that researchers comparing DNNs to humans using prediction-based experiments do not manipulate any variables designed to test hypotheses. Indeed, the standard approach is to compare different DNNs on a given dataset; in this sense, the researcher is manipulating a theoretically motivated variable (the models). However, these manipulations tend to compare models that vary along multiple dimensions (architectures, learning rules, objective functions, etc.) rather than assess the impact of a specific manipulation (e.g., the impact of pretraining on ImageNet). Accordingly, it is rarely possible to attribute any differences in predictivity to any specific manipulation of the models. And even when the modeler does run a controlled experiment in which two models are the same in all respects apart from one specific manipulation (e.g., Mehrer, Spoerer, Kriegeskorte, & Kietzmann, Reference Mehrer, Spoerer, Kriegeskorte and Kietzmann2020), the two models are still being assessed in a prediction-based experiment where there is no assessment of what visual properties of the images are driving the predictions.
This method of evaluating DNNs as models of human vision and object recognition is at odds with general scientific practice. Most research is characterized by running controlled experiments that vary independent variables to test specific hypotheses regarding the causal mechanisms that characterize some natural system (in this case, biological vision). Models are supported to the extent that they account for these experimental results, among other things. The best empirical evidence for a model is that it survives “severe” tests (Mayo, Reference Mayo2018), namely, experiments that have a high probability of falsifying a model if and only if the model is false in some relevant manner. Relatedly, models are also supported to the extent that they can account for a wide range of qualitatively different experimental results because there may be multiple different ways to account for one set of findings but far fewer ways to explain multiple findings. Of course, prediction is also central to evaluating models tested on controlled experiments, but prediction takes the form of accounting for the experimental results of studies that manipulate independent variables, with prediction in the service of explanation. That is, the goal of a model is to test hypotheses about how a natural system works rather than account for the maximum variance on behavioral and brain datasets.
Outside the current DNN modeling of human vision and object recognition there are few areas of science where models are assessed on prediction-based experiments and compete on benchmark datasets with the assumption that, all else being equal, models with better predictions more closely mirror the system under investigation. There are fewer areas still where prediction-based experiments drive theoretical conclusions when it is possible to perform controlled experiments that vary independent variables designed to test specific hypotheses. Even the simpler parallel distributed processing (PDP) network models developed in the 1980s were assessed on their ability to account for a wide range of experimental results reported in psychology (McClelland, Rumelhart, & PDP Research Group, Reference McClelland and Rumelhart1986).
Our contention is that researchers should adopt standard scientific methods and assess models on their ability to accommodate the results of controlled experiments from psychology (and related disciplines) rather than on prediction-based experiments. We not only show that there are principled and practical problems with the current approach, but also, that many of the inferences drawn from prediction-based experiments are in fact wrong.
2.1. The “in principle” problems with relying on prediction when comparing humans to DNNs
There are three fundamental limitations with prediction-based experiments that undermine the strong claims that are commonly made regarding the similarities between DNN and human object recognition.
2.1.1. Correlations do not support causal conclusions
Scientists are familiar with the phrase “correlation does not imply causation,” but the implication for DNN modeling is underappreciated, namely, good predictions do not entail that two systems rely on similar mechanisms or representations (admittedly, not as snappy a phrase). Guest and Martin (Reference Guest and Martin2023) give the example of a digital clock predicting the time of a mechanical clock. One system can provide an excellent (in this case perfect) prediction of another system while relying on entirely different mechanisms. In the same way, DNN models of object recognition that make good (even perfect) predictions on behavioral and brain datasets might be poor models of vision. In the face of good predictions, controlled experiments that manipulate independent variables designed to test hypotheses are needed to determine whether the two systems share similar mechanisms. In the current context, it is the most straightforward way to assess whether a DNN that tops the rankings on a benchmark like Brain-Score is computing in a brain-like manner.
How seriously should we take this objection? If something walks like a duck and quacks like a duck, isn't it in all likelihood a duck? In fact, DNNs often make their predictions in unexpected ways, exploiting “shortcuts” that humans never rely on (e.g., Geirhos et al., Reference Geirhos, Temme, Rauber, Schütt, Bethge and Wichmann2018; Malhotra, Dujmovic, & Bowers, Reference Malhotra, Dujmovic and Bowers2022; Malhotra, Evans, & Bowers, Reference Malhotra, Evans and Bowers2020; Rosenfeld, Zemel, & Tsotsos, Reference Rosenfeld, Zemel and Tsotsos2018). For example, Malhotra et al. (Reference Malhotra, Evans and Bowers2020) systematically inserted single pixels (or clouds of pixels) into photographs in ways that correlated with image category so that the images could be classified based on the photographic subjects themselves or the pixels. DNNs learned to classify the images based on the pixels rather than the photos, even when a single pixel was nearly imperceptible to a human. In all cases of shortcuts, the performance of DNNs is mediated by processes and/or representations that are demonstrably different from those used in biological vision.
The critical issue for present purposes, however, is whether models that classify images based on shortcuts also perform well on prediction-based experiments. Dujmović, Bowers, Adolfi, and Malhotra (Reference Dujmović, Bowers, Adolfi and Malhotra2022) explored this question using RSA which compares the distances between activations in one system to the distances between corresponding activations in the second system (see Fig. 3). To compute RSA, two different systems (e.g., DNNs and brains) are presented the same set of images and the distance between the representations for all pairs of images is computed. This results in two representational dissimilarity matrices (RDMs), one for each system. The similarity of these RDMs gives an RSA score. That is, rather than directly comparing patterns of activations in two systems, RSA is a second-order measure of similarity. In effect, RSA is a measure of representational geometry similarity – the similarity of relative representational distances of two systems. High RSA scores between DNNs and humans (and monkeys) have often been used to conclude that these systems classify images in similar ways (e.g., Cichy, Khosla, Pantazis, Torralba, & Oliva, Reference Cichy, Khosla, Pantazis, Torralba and Oliva2016; Khaligh-Razavi & Kriegeskorte, Reference Khaligh-Razavi and Kriegeskorte2014; Kiat et al., Reference Kiat, Luck, Beckner, Hayes, Pomaranski, Henderson and Oakes2022; Kriegeskorte, Mur, & Bandettini, Reference Kriegeskorte, Mur and Bandettini2008a; Kriegeskorte et al., Reference Kriegeskorte, Mur, Ruff, Kiani, Bodurka, Esteky and Bandettini2008b).

Figure 3. RSA calculation. A series of stimuli from a set of categories (or conditions) are used as inputs to two different systems (e.g., a brain and a DNN). The corresponding neural or unit activity for each stimulus is recorded and pairwise distances in the activations within each system are calculated to get the representational geometry of each system. This representational geometry is expressed as a representational dissimilarity matrix (RDM) for each system. Finally, an RSA score is determined by computing the correlation between the two RDMs (image taken from Dujmović et al., Reference Dujmović, Bowers, Adolfi and Malhotra2022).
To assess whether large RSAs can be obtained between two very different systems, Dujmović et al. (Reference Dujmović, Bowers, Adolfi and Malhotra2022) carried out a series of simulations that computed RSAs between two DNNs or between DNNs and single-cell recordings from macaque IT when the two systems classified objects in qualitatively different ways. For example, when comparing DNNs to macaque IT, the authors trained a DNN to classify photographs taken from Majaj et al. (Reference Majaj, Hong, Solomon and DiCarlo2015) that contained a pixel patch confound (call it DNN-pixel) as well as unperturbed photos (DNN-standard), similar to the Malhotra et al.'s (Reference Malhotra, Evans and Bowers2020) setup described above. The critical finding was that RSAs could be pushed up or down systematically depending on the pixel patch locations. For certain placements of the patches, the RSA observed between the DNN-pixel and macaque IT matched the RSA scores achieved by networks pretrained on naturalistic stimuli (ImageNet dataset) and fine-tuned on the unperturbed images (Fig. 4, left). That is, even macaque IT and DNNs that classified objects based on single pixel patches could share representational geometries (for related discussion, see Kriegeskorte & Wei, Reference Kriegeskorte and Wei2021; Palmer, Reference Palmer1999). By contrast, the location of the patches on the DNN-standard network did not impact RSAs.

Figure 4. RSA (left) and Brain-Score (right) for networks trained on predictive pixels. The location of the pixel patches varied across conditions, such that the location was positively, negatively, or uncorrelated with the representational distances between classes in the macaque IT. When the pixel distances are positively correlated in the training set, RSA scores approached scores achieved by networks pretrained on ImageNet and fine-tuned on unperturbed images. When the training images did not contain the pixel confounds, the location of the pixels at test did not impact RSA scores. The dataset dependence of RSA scores extends to neural predictivity as measured by Brain-Score as the same pixel networks explain significantly more macaque IT activity when the confounding feature is present in the stimuli (RSA scores taken from Dujmović et al., Reference Dujmović, Bowers, Adolfi and Malhotra2022, Brain-Score results are part of ongoing, unpublished research).
Another common prediction method involves directly fitting unit activations from DNNs to brain activations (single-cell recordings or voxels in fMRI) in response to the same set of images using linear regression (e.g., Yamins et al., Reference Yamins, Hong, Cadieu, Solomon, Seibert and DiCarlo2014). This neural predictivity approach is used in the Brain-Score benchmark (Schrimpf et al., Reference Schrimpf, Kubilius, Hong, Majaj, Rajalingham, Issa and DiCarlo2020a, Reference Schrimpf, Kubilius, Lee, Murty, Ajemian and DiCarlo2020b). Despite this important distinction between RSA and neural activity, when these two methods are used on behavioral and brain datasets they are both correlational measures, so again, it is possible that confounds are driving brain predictivity results as well. Consistent with this possibility, DNNs that classify images based on confounding features often perform well on Brain-Score. For example, object shape and texture are confounded in the natural world (and in ImageNet), with DNNs often classifying objects based on their texture and humans based on their shape (Geirhos et al., Reference Geirhos, Rubisch, Michaelis, Bethge, Wichmann and Brendel2019; for more details see sect. 4.1.2). Just as texture representations are used to accurately predict object categories in DNNs, texture representations in DNNs may be used to predict shape representations in the human (and macaque) visual system to obtain high neural predictivity scores. More direct evidence for this comes from ongoing work by Dujmović, Bowers, Adolfi, and Malhotra (Reference Dujmović, Bowers, Adolfi and Malhotra2023) that has shown that neural predictivity is indeed influenced by confounding factors. For example, the ability of DNNs to predict macaque neural activity depended heavily on whether the images contained a confounding feature – in which case predictivity rose drastically compared to when the confound was not present (see Fig. 4, right). In this case, the spatial organization of the confounding pixel patches did not matter, presumably reflecting the fact that neural predictivity does not assess the similarity representational geometries. Thus, a good neural predictivity score may reflect the fact that DNNs are exploiting confounds (shortcuts) in datasets rather than mirroring biological vision.
It is not only the presence of confounds that can lead to misleading conclusions based on predictions. Another factor that may contribute to the neural predictivity score is the effective latent dimensionality of DNNs – that is, the number of principal components needed to explain most of the variance in an internal representation of DNNs. Elmoznino and Bonner (Reference Elmoznino and Bonner2022) have shown that effective latent dimensionality of DNNs significantly correlates with the extent to which they predict evoked neural responses in both the macaque IT cortex and human visual cortex. Importantly, the authors controlled for other properties of DNNs, such as number of units in a layer, layer depth, pretraining, training paradigm, and so on and found that prediction of neural data increases with an increase in effective dimensionality, irrespective of any of these factors. In other words, DNNs may outperform other models on benchmarks such as Brain-Score not because their internal representations or information processing is similar to information processing in the cortex, but because they effectively represent input stimuli in higher dimensional latent spaces.
Of course, two DNNs (or a DNN and a brain) that do represent objects in a highly similar way will obtain high RSAs and high neural predictivity scores, but the common assumption that high RSAs and predictivity scores indicate that two systems work similarly is unsafe. This is illustrated in Figure 5 where better performance on prediction-based experiments can correspond to either more or less similarity to human vision, and where models with benchmark scores of zero can provide important insights into human vision (because the model does not even take images as inputs). The most straightforward way to determine whether good performance on prediction-based experiments reflects meaningful DNN–brain correspondences is to carry out controlled experiments.
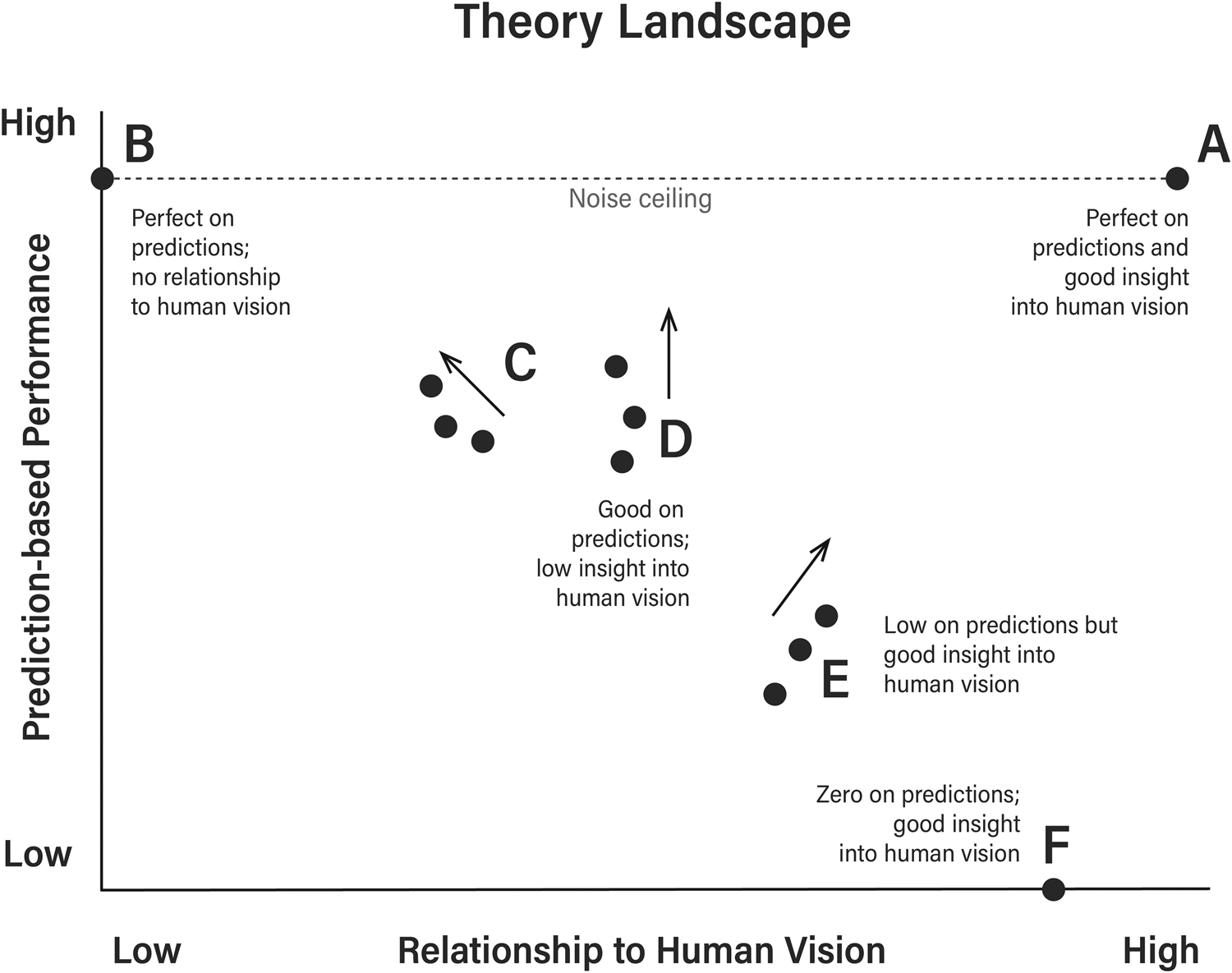
Figure 5. Different models fall in different parts of the theory landscape. Critically, it is possible to do well on prediction-based experiments despite poor correspondences to human vision, and there is no reason to expect that modifying a model to perform better on these experiments will necessarily result in better models of human vision. Similarly, poor performance does not preclude the model from sharing important similarities with human vision. Noise ceiling refers to how well humans predict one another on prediction-based experiments, and it is the best one can expect a model to perform.
2.1.2. Prediction-based experiments provide few theoretical insights
Putting aside the misleading estimates of DNN–human similarity that may follow from prediction-based experiments, the theoretical conclusions one can draw from good predictions are highly limited compared to cases in which models are tested against controlled experiments. For example, perhaps the most fundamental finding regarding human basic-level object recognition is that we largely rely on shape representations (Biederman & Ju, Reference Biederman and Ju1988). This results in humans recognizing objects based on their shape rather than texture when the texture of one category is superimposed on the shape of another (e.g., an image that takes the shape of a cat and a texture of an elephant is classified as a cat; Geirhos et al., Reference Geirhos, Rubisch, Michaelis, Bethge, Wichmann and Brendel2019; for more details see sect. 4.1.2). Importantly, a model's success or failure in capturing this result is theoretically informative. In the case of a success, the model may provide some insight into how shape is encoded in the visual system. And when a model fails, it can provide guidance for future research (e.g., researchers can try to modify the training environments, architectures of DNNs, etc., in theoretically motivated ways to induce a shape bias).
By contrast, no similar insights derive from high scores on prediction-based experiments (even assuming the good predictions provide an accurate reflection of DNN–brain similarity). For example, it is not clear whether the models at the top of the Brain-Score leaderboard classify images based on shape or texture. To answer this question, some sort of controlled experiment needs to be carried out (such as the Geirhos et al., Reference Geirhos, Rubisch, Michaelis, Bethge, Wichmann and Brendel2019, controlled experiment). More generally, when a DNN falls short of the noise ceiling on prediction-based experiments the limited success does not provide specific hypotheses about how to improve the model. Researchers might hypothesize that DNNs should be trained on more ecological datasets (e.g., Mehrer et al., Reference Mehrer, Spoerer, Jones, Kriegeskorte and Kietzmann2021), or that it is important to add top-down connections that characterize the human visual system (e.g., Zhuang et al., Reference Zhuang, Yan, Nayebi, Schrimpf, Frank, DiCarlo and Yamins2021), and so on. However, the size of the gap between performance and the noise ceiling does not suggest which of the different possible research directions should be pursued, or which of multiple different dimensions of variations between models (e.g., the architecture, learning rule, optimization function, etc.) is most responsible for the failure (or success).
2.1.3. Prediction-based experiments restrict the types of theories that can be considered
Finally, the reliance on current prediction-based experiments ensures that only “image-computable” models that can take photorealistic images as inputs are considered. This helps explain why psychological models of object recognition are ignored in the DNN community. By contrast, when assessing models on their ability to account for results of controlled experiments, a broader range of models can be assessed and compared. For example, consider the recognition by components (RBC) model of basic-level object recognition that was first formulated at a conceptual level to explain a wide variety of empirical findings (Biederman, Reference Biederman1987) and later elaborated and implemented in a neural network architecture called JIM (Hummel & Biederman, 1992). These two models could not be any different from the current DNNs given that they characterize representations, processes, and even objective functions in qualitatively different ways. Nevertheless, the RBC and JIM models make multiple predictions regarding human object recognition and vision more generally, and accordingly, can be compared to DNNs in terms of their ability to predict (and explain) a wide variety of empirical phenomena (of the sort reviewed in sect. 4). The common conclusion that DNNs are the best models of human object recognition relies on excluding alternative models that do account for a range of key experimental results reported in psychology.
To summarize, the common claim that DNNs are currently the best models of human vision relies on prediction-based experiments that may provide misleading estimates of DNN–human similarity, that provide little theoretical insight into the similarities that are reported, and that exclude the consideration of alternative models that do explain some key empirical findings. It is important to emphasize that these principled problems do not only limit the conclusions we can draw regarding the current DNNs tested on prediction-based experiments and benchmarks such as Brain-Score (at the time of writing over 200 DNNs have been submitted to the Brain-Score leaderboard with models spanning a wide variety of architectures and objective functions). These problems will apply to any future model evaluated by prediction-based experiments.
2.2. The practical problems with prediction when comparing humans to convolutional neural networks (CNNs)
Apart from the principled problems of comparing DNNs to humans using current prediction-based experiments, there are also a variety of methodological issues that call into question the conclusions that are often drawn. With regard to prediction-based experiments on brain data, perhaps the most obvious practical problem is the relative scarceness of neural data on which the claims are made. For example, as noted above, the Brain-Score match to high-level vision in IT is based on five studies that rely on a total of three monkeys presented with two very similar image datasets. Similarly, the reports of high RSAs between DNNs and human vision have largely relied on a small set of studies, and these studies often suffer methodological limitations (Xu & Vaziri-Pashkam, Reference Xu and Vaziri-Pashkam2021). This raises the concern that impressive predictions may not generalize to other datasets, and indeed, there is some evidence for this. For example, Xu and Vaziri-Pashkam (Reference Xu and Vaziri-Pashkam2021) used a more powerful fMRI design to assess the RSA between DNNs and human fMRI for a new dataset of images, including images of both familiar and novel objects. They found the level of correspondence was much reduced compared to past studies. For familiar objects, they failed to replicate past reports that early layers of DNNs matched V1 processing best and later layers of DNNs matched later layers of visual cortex best. Instead, Xu and Vaziri-Pashkam only obtained high RSAs between early levels of DNNs and V1.Footnote 2 Similarly, with unfamiliar objects, Xu and Vaziri-Pashkam failed to obtain any high DNN–human RSA scores at any layers. These failures were obtained across a wide range of DNNs, including CORnet-S that has been described as the “current best model of the primate ventral visual stream” (Kubilius et al., Reference Kubilius, Schrimpf, Kar, Hong, Majaj, Rajalingham and DiCarlo2019, p. 1) based on its Brain-Score. The impressive DNN–human RSAs reported in the literature may evidently not generalize broadly. For similar outcome in the behavioral domain see Erdogan and Jacobs (Reference Erdogan and Jacobs2017) discussed in section 4.1.9.
Another problem is that DNNs that vary substantially in their architectures support similar levels of predictions (Storrs et al., Reference Storrs, Kietzmann, Walther, Mehrer and Kriegeskorte2021). Indeed, even untrained networks (models that cannot identify any images) often support relatively good predictions on these datasets (Truzzi & Cusack, Reference Truzzi and Cusack2020), and this may simply reflect the fact that good predictions can be made from many predictors regardless of the similarity of DNNs and brains (Elmoznino & Bonner, Reference Elmoznino and Bonner2022). Furthermore, when rank ordering models in terms of their (often similar) predictions, different outcomes are obtained with different datasets. For example, there is only a 0.42 correlation between the two V1 benchmark studies listed on the current Brain-Score leaderboard. Consider just one network: mobilenet_v2_0.75_192 achieves a neural predictivity score of 0.783 on one V1 dataset (ranking in the top 10) and 0.245 on another (outside the top 110). Given the contrasting rankings, it is not sensible to conclude that one model does a better job in predicting V1 activity by simply averaging across only two benchmarks, and more generally, these considerations highlight the problem of ranking networks based on different scores.
In addition, there are issues with the prediction-based experiments carried out on behavioral studies showing that DNNs and humans make similar classification errors (e.g., Kheradpisheh, Ghodrati, Ganjtabesh, & Masquelier, Reference Kheradpisheh, Ghodrati, Ganjtabesh and Masquelier2016; Kubilius, Bracci, & Op de Beeck, Reference Kubilius, Bracci and Op de Beeck2016; Rajalingham et al., Reference Rajalingham, Schmidt and DiCarlo2015, Reference Rajalingham, Issa, Bashivan, Kar, Schmidt and DiCarlo2018; Tuli, Dasgupta, Grant, & Griffiths, Reference Tuli, Dasgupta, Grant and Griffiths2021). Geirhos, Meding, and Wichmann (Reference Geirhos, Meding and Wichmann2020b) argue that the standard methods used to assess behavioral correspondences have led to inflated estimates, and to address this concern, they adapted an error consistency measure taken from psychology and medicine where inter-rater agreement is measured by Cohen's kappa (Cohen, Reference Cohen1960). Strikingly, they reported near chance trial-by-trial error consistency between humans and a range of DNNs. This was the case even with CORnet-S that has one of the highest overall behavioral Brain-Scores. More recently, error consistency was found to improve in DNNs trained on much larger datasets, such as CLIP that is trained on 400 million images (Geirhos et al., Reference Geirhos, Narayanappa, Mitzkus, Thieringer, Bethge, Wichmann and Brendel2021). Nevertheless, the gap between humans and the best performing DNN was substantial. For example, if you consider the top 10 performing models on the Brain-Score leaderboard, the error consistency between DNNs and humans for edge-filtered images (images that keep the edges but remove the texture of images) is 0.17. Clearly, the different methods used to measure behavioral consistency provide very different conclusions, and the DNN–human correspondences for some types of images that humans can readily identify remain very low.
3. The theoretical problem with DNNs as models of human object recognition
Apart from the principled and practical problems with prediction-based experiments, the general approach of modeling human object recognition by optimizing classification performance may be misguided for a theoretical reason, namely, the human visual system may not be optimized to classify images. For example, Malhotra, Dujmovic, Hummel, and Bowers (Reference Malhotra, Dujmovic, Hummel and Bowers2021) argue that the human visual system is unconcerned with the proximal stimulus (the retinal image) except inasmuch as it can be used to make inferences about the distal stimulus (the object in the world) that gave rise to it. The advantage of distal representations is that they afford a wide range of capacities beyond image classification, including visual reasoning (e.g., Hummel, Reference Hummel and Reisburg2013). The downside is that constructing distal representations is an ill-posed problem, meaning it cannot be solved based on the statistics available in the proximal stimuli alone, or in the mapping between the proximal stimulus and, say, an object label. Accordingly, on this view, the visual system relies on various heuristics to estimate the distal properties of objects, and these heuristics reveal themselves in various ways, including Gestalt rules of perceptual organization (see sect. 4.2.3) and shape-processing biases (see sect. 4.1.4). It is unclear whether the relevant heuristics can be learned by optimizing classification performance, and at any rate, current DNNs do not acquire these heuristics, as discussed below.
Furthermore, even if building distal representations from heuristics is a misguided approach to understanding human object recognition, it is far from clear that optimizing on classification is the right approach. Indeed, evolution (which may be considered as an optimization process) rarely (if ever) produces a cognitive or perceptual system in response to a single-selection pressure. Rather, evolution is characterized by “descent through modification” with different selection pressures operating at different times in our evolutionary history (Marcus, Reference Marcus2009; Zador, Reference Zador2019). This results in solutions to complex problems that would never be found if a single-selection process was operative from the start. Marcus (Reference Marcus2009) gives the example of the human injury-prone spinal column that was a modification of a horizontal spine designed for animals with four legs. Better solutions for bipedal walkers can be envisaged, but the human solution was constrained by our ancestors. See Marcus (Reference Marcus2009) for a description of the many foibles of the human mind that he attributes to a brain designed through descent with modification.
Furthermore, evolutionary algorithms can produce solutions to complex problems when there is no selection pressure to solve the problem at all. For example, Lehman and Stanley (Reference Lehman and Stanley2011) used evolutionary algorithms to produce virtual robots that walked. Under one condition the selection pressure was to walk as far as possible and in another the selection pressure was behavioral “novelty,” that is, robots that did something different from all other robots. Despite the lack of any selection pressure to walk, the latter robots walked further. Lehman and Stanley (Reference Lehman and Stanley2011) reported similar outcomes in other domains such as solving mazes, with virtual robots selected to produce novel behaviors doing much better than models selected to solve mazes. Moreover, compared to selecting for the desired outcome directly, novelty search evolved more complex and qualitatively different representations (Woolley & Stanley, Reference Woolley and Stanley2011). The explanation for these counterintuitive findings is that the search environment is often “deceptive,” meaning that optimizing on the ultimate objective will often lead to dead ends. In some cases, the only way to find a solution to an objective (e.g., walking) is to first evolve an archive of architectures and representations that may all appear irrelevant to solving the objective (so-called “stepping stones”; Stanley, Clune, Lehman, & Miikkulainen, Reference Stanley, Clune, Lehman and Miikkulainen2019), and it may require different selection pressure(s) than optimizing for the objective itself.
Even though the human visual system is the product of multiple selection pressures, all the top-performing models on Brain-Score and related prediction-based experiments were just optimized to classify objects. Of course, these DNNs do have “innate” structures generally composed of a collection of convolution and pooling operators, but these structures are largely chosen because they improve object recognition on ImageNet and other image datasets. Furthermore, despite the fact that convolutions and pooling are loosely inspired by neuroscience, the architectures of DNNs are radically different from brain structures in countless ways (Izhikevich, Reference Izhikevich2004), including the fact that (1) neurons in the cortex vary dramatically in their morphology whereas units in DNNs tend to be the same apart from their connection weights and biases, and (2) neurons fire in spike trains where the timing of action potentials matter greatly whereas there is no representation of time in feed-forward or recurrent DNNs other than processing steps. This is even more so for recent state-of-the-art transformer models of object recognition (Tuli et al., Reference Tuli, Dasgupta, Grant and Griffiths2021) that do not even include innate convolution and pooling operators.
It is not a safe assumption that these (and countless other) different starting points do not matter, and that optimizing on classification will bridge the difference between DNNs and human object recognition. Similarly, more recent self-supervised networks are first optimized to predict their visual inputs and only subsequently optimized to classify the images, but again, it is far from clear that self-supervision provides the right starting point to optimize on classification. A related critique has been applied to Bayesian theories in psychology and neuroscience according to which minds and brains are (near) optimal in solving a wide range of tasks. Again, little consideration is given to descent with modification or physiological constraints on solutions, and this can lead to “just so” stories where models account for human performance on a set of tasks despite functioning in qualitatively different ways (Bowers & Davis, Reference Bowers and Davis2012a, Reference Bowers and Davis2012b; for response see Griffiths, Chater, Norris, & Pouget, Reference Griffiths, Chater, Norris and Pouget2012).
This theoretical concern should be considered in the context of the principled and practical problems of evaluating models on prediction-based experiments on behavioral and brain studies. That is, it is not only possible that DNNs and humans identify objects in qualitatively different ways despite good predictions, but there are also good reasons to expect that they do. As we show next, the empirical evidence strongly suggests that current DNNs and humans do indeed identify objects in very different ways.
4. The empirical problem with claiming DNNs and human vision are similar
These principled, practical, and theoretical issues do not rule out the possibility that current DNNs are good or even the current best models of human vision and object recognition. Rather, they imply that the evidence from this approach is ambiguous and strong conclusions are not yet justified. What is needed are controlled experiments to better characterize the mechanisms that support DNN and human object recognition.
In fact, some researchers have assessed how well models account for the results of controlled experiments in psychology in which images have been manipulated to test specific hypotheses. In some cases the behavior of a model (i.e., the model's output) is compared with human behavior, and in other cases, the activations of hidden units within a model are compared to perceptual phenomena reported by humans. Although these findings are largely ignored by modelers focused on brain-prediction studies, it is striking how often these studies highlight stark discrepancies between DNNs and humans, and how informative these studies are for developing better models of human vision. In this section, we review multiple examples of DNNs failing to account for key experimental results reported in psychology. We also review key psychological phenomena that have largely been ignored and that require more investigation.
4.1. Discrepancies
4.1.1. DNNs are highly susceptible to adversarial attacks
Adversarial images provide a dramatic example of an experimental manipulation that reveals a profound difference between human and DNN object recognition. Adversarial images can be generated to look unfamiliar to humans but that nevertheless fool DNNs into confidently classifying them as members of familiar categories (see Fig. 6). These images do not appear in behavioral benchmarks such as those used in Brain-Score, and if they were, they would undermine any claim that humans and DNNs make similar errors when classifying images. Some researchers have pointed out that humans experience visual illusions, and adversarial attacks might just be considered a form of illusion experienced by DNNs (Kriegeskorte, Reference Kriegeskorte2015). However, these “illusions” are nothing like the illusions experienced by humans. Although there have been some reports that humans and DNNs encode adversarial images in a similar way (Zhou & Firestone, Reference Zhou and Firestone2019), careful behavioral studies show this is not the case (Dujmović, Malhotra, & Bowers, Reference Dujmović, Malhotra and Bowers2020). There has been some limited success at making DNNs more robust to adversarial attacks by explicitly training models to not classify these images as familiar categories. But it is not necessary to train humans in this way. What is needed is a psychologically plausible account that fully addresses the problem.

Figure 6. Example of adversarial images for three different stimuli generated in different ways. In all cases the model is over 99% confident in its classification. Images taken from Nguyen, Yosinski, and Clune (Reference Nguyen, Yosinski and Clune2015).
4.1.2. DNNs often classify images based on texture rather than shape
A fundamental conclusion from psychological research is that humans largely rely on shape when identifying objects. Indeed, adults classify line drawings of objects as quickly as colored photographs (Biederman & Ju, Reference Biederman and Ju1988), and infants can recognize line drawings the first time they are seen (Hochberg & Brooks, Reference Hochberg and Brooks1962). Accordingly, a model of human object recognition should largely rely on shape when classifying objects. However, this is not the case for most DNN models that perform well on Brain-Score and other prediction metrics. For example, Geirhos et al. (Reference Geirhos, Rubisch, Michaelis, Bethge, Wichmann and Brendel2019) developed a “style transfer” dataset where the textures of images from one category were superimposed on the shapes of images from other categories (e.g., a shape of a cat with the texture of an elephant) to assess the relative importance of texture versus shape on object recognition. Unlike humans, DNNs trained on natural images relied more on texture (e.g., classifying a cat–elephant image as an elephant; see Fig. 7). Indeed, the CORnet-S model described as one of the best models of human vision largely classifies objects based on texture (Geirhos et al., Reference Geirhos, Meding and Wichmann2020b), and this contrast between DNNs and humans extends to children and adults (Huber, Geirhos, & Wichmann, Reference Huber, Geirhos and Wichmann2022; but see Ritter, Barrett, Santoro, & Botvinick, Reference Ritter, Barrett, Santoro and Botvinick2017, for the claim that DNNs have a human-like shape-bias).

Figure 7. Illustration of a style-transfer image in which (a) the texture of an elephant and (b) the shape of a cat that combine to form (c) the shape of a cat with the texture of an elephant. The top three classifications of a DNN to the three images are listed below each image, with the model classifying the style-transfer image as an elephant with 63.9% confidence (the cat is not in the top three choices of the DNN that together account for 99.9% of its confidence). Images taken from Geirhos et al. (Reference Geirhos, Rubisch, Michaelis, Bethge, Wichmann and Brendel2019).
More recently, Malhotra et al. (Reference Malhotra, Dujmovic and Bowers2022) compared how DNNs and humans learn to classify a set of novel stimuli defined by shape as well as one other nonshape diagnostic feature (including patch location and segment color as shown in Fig. 8). Humans showed a strong shape-bias when classifying these images, and indeed, could not learn to classify the objects based on some nonshape features. By contrast, DNNs had a strong bias to rely on these very same nonshape features. Importantly, when the DNNs were pretrained to have a shape bias (by learning to classify a set of images in which shape but not texture was diagnostic of object category), the models nevertheless focused on nonshape features when subsequently trained to classify these stimuli. This was the case even after freezing the convolutional layers of a shape-biased ResNet50 (i.e., freezing 49 of the 50 layers of the DNN). This suggests that the contrasting shape biases of DNNs and humans is not the product of their different training histories as sometimes claimed (Hermann, Chen, & Kornblith, Reference Hermann, Chen and Kornblith2020).

Figure 8. Examples of novel stimuli defined by shape as well as one other nonshape feature. In (a) global shape and location of one of the patches define a category, and for illustration, the predictive patch is circled. Stimuli in the same category (top row) have a patch with the same color and the same location, while none of the stimuli in any other category (bottom row) have a patch at this location. In (b) global shape and color of one of the segments predicts stimulus category. Only stimuli in the same category (top row) but not in any other category (bottom row) have a segment of this color (red). The right-most stimulus in the top row shows an example of an image containing a nonshape feature (red segment) but no shape feature. Images taken from Malhotra et al. (Reference Malhotra, Dujmovic and Bowers2022).
4.1.3. DNNs classify images based on local rather than global shape
Although DNNs rely more on texture than shape when classifying naturalistic images (images in which both shape and texture are diagnostic of category), several studies have shown that modifying the learning environment (Geirhos et al., Reference Geirhos, Rubisch, Michaelis, Bethge, Wichmann and Brendel2019; Hermann et al., Reference Hermann, Chen and Kornblith2020) or architecture (Evans, Malhotra, & Bowers, Reference Evans, Malhotra and Bowers2022) of DNNs can increase the role of shape in classifying naturalistic images. Nevertheless, when DNNs classify objects based on shape, they use the wrong sort of shape representations. For instance, in contrast to a large body of research showing that humans tend to rely on the global shape of objects, Baker, Lu, Erlikhman, and Kellman (Reference Baker, Lu, Erlikhman and Kellman2018b) showed that DNNs focus on local shape features. That is, they found that DNNs trained on ImageNet could correctly classify some silhouette images (where all diagnostic texture information was removed), indicating that these images were identified based on shape. However, when the local shape features of the silhouettes were disrupted by including jittered contours, the models functioned much more poorly. By contrast, DNNs were more successful when the parts of the silhouettes were rearranged, a manipulation that kept many local shape features but disrupted the overall shape. Humans show the opposite pattern (see Fig. 9).

Figure 9. Illustration of (a) a silhouette image of a camel, (b) and image of a camel in which local shape features were removed by including jittered contours, and (c) and image of a camel in which global shape was disrupted. The DNNs had more difficulty under conditions (b) than (c). Images taken from Baker et al. (Reference Baker, Lu, Erlikhman and Kellman2018b).
4.1.4. DNNs ignore the relations between parts when classifying images
Another key property of human shape representations is that the relations between object parts play a key role in object recognition. For example, Hummel and Stankiewicz (Reference Hummel and Stankiewicz1996) trained participants to identify a set of “basis” objects that were defined by their parts and the relation between the parts, and then assessed generalization on two sets of images: (1) Relational variants that were highly similar in terms of pixel overlap but differed in a categorical relation between two parts, and (2) pixel variants that differed more in terms of their pixel overlap but shared the same set of categorical relations (see Fig. 10). Across five experiments participants frequently mistook the pixel variants as the basis objects but rarely the relational variants, indicating that the human visual system is highly sensitive to the relations. By contrast, when DNNs were trained on the basis objects, the models mistook both the relational and pixel variants as the basis objects and were insensitive to the relations (Malhotra et al., Reference Malhotra, Dujmovic, Hummel and Bowers2021). This was the case even after explicitly training the DNNs on these sorts of relations. As noted by Malhotra et al., the human encoding of relations between object parts may be difficult to achieve with current DNNs and additional mechanisms may be required.

Figure 10. Example of (a) a basis object, (b) a relational variant object that was identical to the basis object except that one line was moved so that its “above/below” relation to the line to which it was connected changed (from above to below or vice-versa), as highlighted by the circle, and (c) a pixel variant object that was identical to the basis object except that two lines were moved in a way that preserved the categorical spatial relations between all the lines composing the object, but changed the coordinates of two lines, as highlighted by the oval. Images taken from Malhotra et al. (Reference Malhotra, Dujmovic, Hummel and Bowers2021).
4.1.5. DNNs fail to distinguish between boundaries and surfaces
In human vision boundaries and surfaces of objects are processed separately and then combined early in the visual processing stream to perceive colored and textured objects. This separation is observed in V1 with neurons in the “interblobs” system coding for line orientations independent of color and contrast and neurons in a “blob” system coding for color in a way that is less dependent on orientation (Livingstone & Hubel, Reference Livingstone and Hubel1988). A wide variety of color, lightness, and shape illusions are the product of the interactions between these two systems (Grossberg & Mingolla, Reference Grossberg and Mingolla1985), with no explanation offered in DNNs that fail to factorize shape and color in two parallel streams. See Figure 11 for a striking example of surface filling-in from boundaries. Importantly, filling-in occurs early, such that illusory surfaces can “pop-out,” a signature that the process occurs before an attentional bottleneck constrains parallel visual processing (Ramachandran, Reference Ramachandran1992). The entanglement of shape and color representations in convolutional neural networks (CNNs) may also help explain why DNNs do not have a strong shape bias when classifying objects.

Figure 11. Phenomenon of filling-in suggests that edges and textures are initially processed separately and then combined to produce percepts. In this classic example from Krauskopf (Reference Krauskopf1963), an inner green disk (depicted in white) is surrounded by a red annulus (depicted in dark gray). Under normal viewing conditions the stimulus at the top left leads to the percept at the top right. However, when the red-green boundary was stabilized on the retina as depicted in the figure in the lower left, subjects reported that the central disk disappeared and the whole target – disk and annulus – appeared red, as in lower right. That is, not only does the stabilized image (the green-red boundary) disappear (due to photo-receptor fatigue), but the texture from the outer annulus fills-in the entire surface as there is no longer a boundary to block the filling-in process. For more details see Pessoa, Tompson, and Noe (Reference Pessoa, Thompson and Noë1998).
4.1.6. DNNs fail to show uncrowding
Our ability to perceive and identify objects is impaired by the presence of nearby objects and shapes, a phenomenon called crowding. For instance, it is much easier to identify the letter X in peripheral vision if it is presented in isolation compared to when it is surrounded by other letters, even if one knows where the letter is located. A more surprising finding is uncrowding, where the addition of more surrounding objects makes the identification of the target easier. Consider Figure 12 where participants are asked to perform a vernier discrimination task by deciding whether the top vertical line from a pair of vertical lines is shifted to the left or right. Performance is impaired when these lines are surrounded by a square rather than presented by themselves, an example of crowding. However, performance is substantially improved by the inclusion of additional squares, highlighting the role of long-range Gestalt-like processes in which the squares are grouped together and then processed separately from the vernier (Saarela, Sayim, Westheimer, & Herzog, Reference Saarela, Sayim, Westheimer and Herzog2009). Standard DNNs are unable to explain uncrowding, but the LAMINART model of Grossberg and colleagues (e.g., Raizada & Grossberg, Reference Raizada and Grossberg2001) designed to support grouping processes can capture some aspects of uncrowding (Francis, Manassi, & Herzog, Reference Francis, Manassi and Herzog2017). Like the failure of DNNs to capture global shape, DNNs do not appear to encode the global organization of objects in a scene.

Figure 12. (a) Under the standard vernier discrimination conditions two vertical lines are offset, and the task of the participant is to judge whether the top line is to the left or right of the bottom line. (b) Under the crowding condition the vernier stimulus is surrounded by a square and discriminations are much worse. (c) Under the uncrowding condition a series of additional squares are presented. Performance is much better here, although not as good as in (a).
4.1.7. DNNs are poor at identifying degraded and deformed images
Humans can identify objects that are highly distorted or highly degraded. For instance, we can readily identify images of faces that are stretched by a factor of four (Hacker & Biederman, Reference Hacker and Biederman2018), when images are partly occluded or presented in novel poses (Biederman, Reference Biederman1987), and when various sorts of visual noise are added to the image (Geirhos et al., Reference Geirhos, Narayanappa, Mitzkus, Thieringer, Bethge, Wichmann and Brendel2021). By contrast, CNNs are much worse at generalizing under these conditions (Alcorn et al., Reference Alcorn, Li, Gong, Wang, Mai, Ku and Nguyen2019; Geirhos et al., Reference Geirhos, Temme, Rauber, Schütt, Bethge and Wichmann2018, Reference Geirhos, Narayanappa, Mitzkus, Thieringer, Bethge, Wichmann and Brendel2021; Wang et al., Reference Wang, Zhang, Xie, Zhou, Premachandran, Zhu and Yuille2018; Zhu, Tang, Park, Park, & Yuille, Reference Zhu, Tang, Park, Park and Yuille2019). It should be noted that the larger DNNs do better on degraded images (e.g., CLIP trained on 400 million images), but the types of errors the models make are still very different than humans (Geirhos et al., Reference Geirhos, Narayanappa, Mitzkus, Thieringer, Bethge, Wichmann and Brendel2021).
4.1.8. DNNs have a superhuman capacity to classify unstructured data
While CNNs are too sensitive to various perturbations to objects, CNNs can learn to classify noise-like patterns at a superhuman level. For example, Zhang, Bengio, Hardt, Recht, and Vinyals (Reference Zhang, Bengio, Hardt, Recht and Vinyals2017) trained standard DNNs with ~1 million images composed of random pixel activations (TV static-like images) that were randomly assigned to 1,000 categories. This shows that DNNs have a much greater capacity to memorize random data compared to humans, and this excess capacity may be exploited by DNNs to identify naturalistic images.
Tsvetkov, Malhotra, Evans, and Bowers (Reference Tsvetkov, Malhotra, Evans and Bowers2020, Reference Tsvetkov, Malhotra, Evans and Bowers2023) reduced the memorization capacities of DNNs by adding noise to the activation function (mirroring noise in neural activation), a bottleneck after the input canvas (analogous to the optic nerve where there are approximately 100 times fewer ganglion cells compared to photoreceptors), and using sigmoidal units that bound activation rather than rectified linear units common in state-of-the-art DNNs that can take on unbounded activation values. These modifications resulted in DNNs that were much better at learning to classify images from the CIFAR10 dataset compared to learning to classify random noise, consistent with human performance. At the same time, these networks were no better at classifying degraded CIFAR10 images. One challenge going forward will be to design DNNs that fail to learn random data but can identify degraded and deformed naturalistic images.
4.1.9. DNNs do not account for human similarity judgments for novel three-dimensional (3D) shapes
There are various reports that DNNs provide a good account of human similarity judgments for familiar categories (Peterson, Abbott, & Griffiths, Reference Peterson, Abbott and Griffiths2018; but see Geirhos et al., Reference Geirhos, Meding and Wichmann2020a). However, similarity judgments break down for unfamiliar objects. For example, German and Jacobs (Reference German and Jacobs2020) measured human similarity judgments between pairs of novel part-based naturalistic objects (fribbles) presented across multiple viewpoints. These judgments were then compared with the similarities observed in DNNs in response to the same stimuli. Overall, the degree of DNN–human similarity was only slightly better than would be predicted from a pixel-based similarity score, with accuracy near chance (under 58% with a baseline of 50%). Similar results were obtained by Erdogan and Jacobs (Reference Erdogan and Jacobs2017) when they assessed DNN–human similarity to novel 3D, cuboidal objects. The best similarity score was somewhat higher (64% with a baseline of 50%) and better than pixel-based similarity score, but much lower than an alternative Bayesian model which reached an accuracy of 87%. This no doubt relates to the observation that DNNs do not represent the relations between object parts (Malhotra et al., Reference Malhotra, Dujmovic, Hummel and Bowers2021), a likely factor in the human similarity judgments for these multi-part 3D unfamiliar stimuli. Note, these behavioral outcomes are in line with the Xu and Vaziri-Pashkam (Reference Xu and Vaziri-Pashkam2021) results described above where they found that RSA scores between DNNs and fMRI signals were especially poor for unfamiliar objects.
4.1.10. DNNs fail to detect objects in a human-like way
Humans and CNNs not only classify objects but can also detect (and locate) objects in a scene. In the case of humans, there was an early report that object detection and object recognition occur at the same processing step in the visual system with Grill-Spector and Kanwisher (Reference Grill-Spector and Kanwisher2005) concluding “as soon as you know it is there, you know what it is.” Subsequent research addressed some methodological issues with this study and showed that humans can detect an object before they know what it is (Bowers & Jones, Reference Bowers and Jones2007; Mack, Gauthier, Sadr, & Palmeri, Reference Mack, Gauthier, Sadr and Palmeri2008). With regard to DNNs, there are multiple different methods of object detection, but in all cases we are aware of, detection depends on first classifying objects (e.g., Redmon, Divvala, Girshick, & Farhadi, Reference Redmon, Divvala, Girshick and Farhadi2016; Zhao, Zheng, Xu, & Wu, Reference Zhao, Zheng, Xu and Wu2019). Why the difference? In the case of humans there are various low-level mechanisms that organize a visual scene prior to recognizing objects: Edges are assigned to figure or ground (Driver & Baylis, Reference Driver and Baylis1996), depth segregation is computed (Nakayama, Shimojo, & Silverman, Reference Nakayama, Shimojo and Silverman1989), nonaccidental properties such as collinearity, curvature, cotermination, and so on are used to compute object parts (Biederman, Reference Biederman1987). These processes precede and play a causal role in object recognition, and these earlier processes presumably support object detection (explaining why detection is faster). The fact that CNNs recognize objects before detecting them suggests that they are lacking these earlier processes so central to human vision.
4.1.11. DNNs fail in same/different reasoning
The human visual system not only supports object recognition, but also visual reasoning (Hummel, Reference Hummel, Deitrich and Markman2000). Perhaps the simplest visual reasoning task is deciding whether two images are the same or different. Although there have been some recent reports that DNNs can support same/different judgments (Funke et al., Reference Funke, Borowski, Stosio, Brendel, Wallis and Bethge2021; Messina, Amato, Carrara, Gennaro, & Falchi, Reference Messina, Amato, Carrara, Gennaro and Falchi2021) the models were only tested on images that were very similar to the training set. Puebla and Bowers (Reference Puebla and Bowers2022) provided a stronger test of whether DNNs support human-like same/different reasoning by testing DNNs on stimuli that differed from the training set (see Fig. 13 for examples of images). The models failed when they were trained on stimuli taken from the set illustrated in the left-most panel of Figure 13 and tested on most other sets. Indeed, models failed on some test sets when trained to perform same/different judgments on stimuli from all sets but the test set. Even a network specifically designed to support visual relational reasoning, namely a relation network (Santoro et al., Reference Santoro, Raposo, Barrett, Malinowski, Pascanu, Battaglia and Lillicrap2017), failed on some stimulus sets when trained on all others. For humans this is trivial without any training on the same/different task for any stimulus set.

Figure 13. Example stimuli taken from nine different stimulus sets, with the same trials depicted on the top row, different trials on the bottom. The level of similarity between stimulus sets varied, with the greatest overlap between the irregular and regular sets, and little overlap between the irregular set on the one hand and the lines or arrow datasets on the other. Image taken from Puebla and Bowers (Reference Puebla and Bowers2022).
4.1.12. DNNs are poor at visual combinatorial generalization
There are various reports that DNNs can support combinatorial generalization, but performance breaks down when more challenging conditions are tested. For example, Montero, Ludwig, Costa, Malhotra, and Bowers (Reference Montero, Ludwig, Costa, Malhotra and Bowers2021) explored whether DNNs that learn (or are given) “disentangled” representations (units that selectively encode one dimension of variation in a dataset) support the forms of combinatorial generalization that are trivial for humans. Despite the claim that disentangled representations support better combinatorial generalization (e.g., Duan et al., Reference Duan, Matthey, Saraiva, Watters, Burgess, Lerchner and Higgins2019), Montero et al. found a range of variational autoencoders trained to reproduce images succeeded under the simplest conditions but failed in more challenging ones. Indeed, DNNs with disentangled representations were no better than models using entangled (or distributed) representations. For example, after training to reproduce images of shapes on all locations except for squares on the right side of the canvas, the models were unable to do so at test time, even though they had observed squares at other positions and other shapes at the right side. These results were consistent across other factor combinations and datasets and have been replicated using other training mechanisms and models (Schott et al., Reference Schott, von Kügelgen, Träuble, Gehler, Russell, Bethge and Brendel2021). More recently, Montero, Bowers, Ludwig, Costa, and Malhotra (Reference Montero, Bowers, Ludwig, Costa and Malhotra2022) have shown that both the encoder and decoder components of variational autoencoders fail to support combinatorial generalization, and in addition, provide evidence that past reports of successes were in fact not examples of combinatorial generalization. There are still other models that appear to support combinatorial generalization under related conditions (Burgess et al., Reference Burgess, Matthey, Watters, Kabra, Higgins, Botvinick and Lerchner2019; Greff et al., Reference Greff, Kaufman, Kabra, Watters, Burgess, Zoran and Lerchner2019), and it will be interesting to test these models under the conditions that disentangled models failed.
This pattern of success on easier forms of combinatorial generalization but failure on more challenging forms is common. For example, Barrett, Hill, Santoro, Morcos, and Lillicrap (Reference Barrett, Hill, Santoro, Morcos and Lillicrap2018) assessed the capacity of various networks to perform Raven-style progressive matrices, a well-known test of human visual reasoning. Although the model did well under some conditions, the authors noted that a variety of state-of-the-art models (including relational networks designed to perform well in combinatorial generalization) did “strikingly poorly” when more challenging forms of combinatorial generalization were required. As noted by Greff, van Steenkiste, and Schmidhuber (Reference Greff, van Steenkiste and Schmidhuber2020), combinatorial generalization may require networks that implement symbolic processes through dynamic binding (currently lacking in DNNs) and they emphasize that better benchmarks are required to rule out any forms of shortcuts that DNNs might exploit (also see Montero et al., Reference Montero, Bowers, Ludwig, Costa and Malhotra2022, who identify conditions in which models appear to solve combinatorial tasks but fail when tested appropriately).
4.1.13. Additional failures on object recognition tasks
Perhaps the most systematic attempt to date to compare DNNs to psychological phenomena was carried out by Jacob, Pramod, Katti, and Arun (Reference Jacob, Pramod, Katti and Arun2021). They reported some correspondences between humans and DNNs (described in sect. 4.2.8), but also a series of striking discrepancies. Among the failures, they showed DNNs trained on ImageNet do not encode the 3D shape of objects, do not represent occlusion or depth, and do not encode the part structure of objects. For example, to investigate the representations of 3D shape, the authors presented pairs of images such as those in Figure 14 to DNNs. Humans find it easier to distinguish between the pair of images at the top of the figure compared to the pairs at the bottom even though each pair is distinguished by the same feature difference. The explanation is that humans perceive the former pair as 3D that take on different orientations whereas the latter stimuli are perceived as two-dimensional (2D). By contrast, DNNs do not represent the former pair as more dissimilar, suggesting that the models did not improve on the 3D structure of these stimuli. Relatedly, Heinke, Wachman, van Zoest, and Leek (Reference Heinke, Wachman, van Zoest and Leek2021) showed that DNNs are poor at distinguishing between possible and impossible 3D objects, again suggesting DNNs fail to encode 3D object shape geometry.

Figure 14. For humans the perceptual distance between the top pair of figures (marked d1) is larger than the perceptual distance between the two pairs of objects on the bottom (marked d2). For DNNs, the perceptual distance is the same for all pairs. Images taken from Jacob et al. (Reference Jacob, Pramod, Katti and Arun2021).
4.2. Key experimental phenomena that require more study before any conclusions can be drawn
There are also a wide range of important psychological findings in vision that have received little consideration when assessing the similarities between human vision and DNNs. In a few of these cases there is some evidence that DNNs behave like humans, but the results remain preliminary and require more study before any strong conclusions are warranted. Here we briefly review some phenomena that should be further explored.
4.2.1. Perceptual constancies
Human vision supports a wide range of visual constancies, including color, shape, and lightness constancies, where perceptual judgments remain stable despite changes in retinal input. For example, we often perceive the color of an object as stable despite dramatic changes in lighting conditions that change the wavelengths of light projected onto the retina. Similarly, we tend to perceive the size of an object as stable despite radical changes in the size of the retinal image when the object is viewed from nearby or far away. Perceptual constancies are critical to the visual system's ability to transform a proximal image projected on the retina into a representation of the distal object. Various forms of perceptual learning appear to operate on constancy-based perceptual representations rather than early sensory representations (Garrigan & Kellman, Reference Garrigan and Kellman2008). By contrast, it is not clear to what extent DNNs support perceptual constancies. Current evidence suggests that they do not, given that DNNs tend to learn the simplest regularities present in the input (e.g., Malhotra et al., Reference Malhotra, Dujmovic, Hummel and Bowers2021; Shah, Tamuly, Raghunathan, Jain, & Netrapalli, Reference Shah, Tamuly, Raghunathan, Jain and Netrapalli2020), and consequently, often learn shortcuts (Geirhos et al., Reference Geirhos, Jacobsen, Michaelis, Zemel, Brendel, Bethge and Wichmann2020a).
4.2.2. Online invariances
Human vision supports various visual invariances such that familiar objects can be identified when presented at novel scales, translations, and rotations in the image plane, as well as rotations in depth. Furthermore, these invariances extend to untrained novel objects – what is sometimes called “online” invariance or tolerance (Blything, Biscione, & Bowers, Reference Blything, Biscione and Bowers2020; Bowers, Vankov, & Ludwig, Reference Bowers, Vankov and Ludwig2016). Although DNNs can be trained (Biscione & Bowers, Reference Biscione and Bowers2021; Blything, Biscione, Vankov, Ludwig, & Bowers, Reference Blything, Biscione, Vankov, Ludwig and Bowers2021) or their architectures modified (Zhang, Reference Zhang2019) to support a range of online invariances, there are no experiments to date that test whether these models support invariance in a human-like way.
4.2.3. Gestalt principles
A wide range of Gestalt rules play a central role in organizing information in visual scenes, including organization by proximity, similarity, continuity, connectedness, and closure. That is, we do not just see the elements of a scene, we perceive patterns or configurations among the elements, such that “the whole is more than the sum of its parts.” This is not unique to the human cognitive architecture as some nonhuman animals show Gestalt effects (Pepperberg & Nakayama, Reference Pepperberg and Nakayama2016). Gestalt rules are not just some curiosity, they play a fundamental role in how we recognize objects by organizing the components of a scene (Biederman, Reference Biederman1987; Palmer, Reference Palmer, Healy and Proctor2003; Wagemans et al., Reference Wagemans, Elder, Kubovy, Palmer, Peterson, Singh and von der Heydt2012). There are a few reports that DNNs are sensitive to closure (Kim, Reif, Wattenberg, & Bengio, Reference Kim, Reif, Wattenberg, Bengio and Mozer2021), although local features may mediate these effects (Baker, Kellman, Erlikhman, & Lu, Reference Baker, Kellman, Erlikhman and Lu2018a; Pang, O'May, Choksi, & VanRullen, Reference Pang, O'May, Choksi and VanRullen2021), and these effects only occur in the later layers of the network (whereas Gestalt closure effects can be detected in early human vision; Alexander & Van Leeuwen, Reference Alexander and Van Leeuwen2010). Biscione and Bowers (Reference Biscione and Bowers2022) provided some additional evidence that DNNs trained on ImageNet are indeed (somewhat) sensitive to closure in their later layers, but these same networks failed to support the Gestalt effects of orientation, proximity, and linearity, as illustrated in Figure 15. More work is needed to characterize which (if any) Gestalt effects are manifest in current DNNs. It is possible that differences in perceptual grouping processes may play a role in several additional DNN–human discrepancies, such as the failure of DNNs to identify objects based on global features, the failure of DNNs to show uncrowding, or the fact that DNNs classify objects before they detect them.

Figure 15. Pomerantz and Portillo (Reference Pomerantz and Portillo2011) measured Gestalts by constructing a base pair of images (two dots in different locations) and then adding the same context stimulus to each base such that the new image pairs could be distinguished not only using the location of the dots in the base, but also the orientation, linearity, or proximity of the dots. They reported that human participants are faster to distinguish the pair of stimuli under the latter conditions than under the base condition. By contrast, the various DNNs, including DNNs that perform well on Brain-Score, treat the pairs under the orientation, linearity, and proximity conditions as more similar. Images taken from Biscione and Bowers (Reference Biscione and Bowers2023).
4.2.4. Illusions
Another obvious and striking feature of human vision is the range of visual illusions we experience. There are a few reports that some predictive coding models (e.g., PredNet) display some human-like illusions (e.g., Lotter, Kreiman, & Cox, Reference Lotter, Kreiman and Cox2020), although again, more work is needed to determine the extent of the similarity, and most illusions have been given no consideration. By contrast, illusions have been central to the development of theories and models of vision in psychology (most notably by Grossberg; for an excellent and accessible review, see Grossberg, Reference Grossberg2021) because they provide insight into the way that lightness, color, shape, occlusion, and other stimulus features are used and combined by the human visual system. Interesting, although PredNet captures a number of psychological findings better than standard DNNs, it performs poorly on Brain-Score, currently ranked 177 out of 216 models listed, and Grossberg's models are not even image computable.
4.2.5. Limits in visual short-term memory capacity and attention
There is a variety of evidence suggesting that the visual system attends and encodes approximately four items at a time in short-term memory (Cowan, Reference Cowan2001; Pylyshyn & Storm, Reference Pylyshyn and Storm1988; Sperling, Reference Sperling1960). For example, in “multi-object tracking” experiments, multiple dots or objects move around in a display and participants need to track the movement of a subset of them. Participants generally track about four items (Pylyshyn & Storm, Reference Pylyshyn and Storm1988). Similarly, limits in visual attention are highlighted in visual search experiments in which response times to targets among distractors varies with the visual properties of the target and distractor items (Duncan & Humphreys, Reference Duncan and Humphreys1989; Wolfe, Reference Wolfe1994; Wolfe et al., Reference Wolfe, Cave and Franzel1989). For example, a search for a target that differs from the distractors by one easily discriminable feature tends to proceed in a parallel fashion with no difference in response time as a function of set size, whereas a search for a target that can only be distinguished from distractors by a conjunction of multiple features tends to take longer as a function of the number of items in the display, suggesting serial attentional processing of the items until the target is found (Triesman & Gelade, Reference Treisman and Gelade1980). Various manifestations of limited short-term memory and attention can be observed in human object recognition and scene processing, including change blindness where (sometimes large) changes in scenes go unnoticed (Simons & Levin, Reference Simons and Levin1997), and illusory conjunctions in which features of one object are bound to the features of another (e.g., when briefly flashing an image containing a blue square and red circle, participants will sometimes report seeing a red square and blue circle; Treisman & Schmidt, Reference Treisman and Schmidt1982).
However, there is no analogous visual short-term memory constraint in feedforward DNNs, and we are not aware of any reports that recurrent DNNs manifest any of the human errors that reflect biological visual short-term memory and attention constraints. While some recurrent attention networks (RANs) have attempted to address the problem of serial attentional selection via glimpse mechanisms (Ba et al., Reference Ba, Mnih and Kavukcuoglu2014; Mnih et al., Reference Mnih, Heess and Graves2014; Xu et al., Reference Xu, Ba, Kiros, Cho, Courville, Salakhudinov and Bengio2015), such mechanisms do not provide an account of the influence of item features on processing, nor the associated response time effects.
4.2.6. Selective neuropsychological disorders in vision
The key insight from cognitive neuropsychology is that brain damage can lead to highly selective visual disorders. Perhaps the most well-known set of findings is that acquired dyslexia selectively impairs visual word identification whereas prosopagnosia selectively impairs face identification, highlighting how different systems are specialized for recognizing different visual categories (Farah, Reference Farah2004). Similarly, lesions can selectively impact vision for the sake of identifying objects versus vision for the sake of action in the ventral and dorsal visual systems, respectively (Goodale & Milner, Reference Goodale and Milner1992). Various forms of visual agnosia have provided additional insights into how objects are identified (Farah, Reference Farah2004), and different forms of acquired alexia have provided insights into the processes involved in visual word identification (Miozzo & Caramazza, Reference Miozzo and Caramazza1998). In addition, selective disorders in motion (Vaina, Makris, Kennedy, & Cowey, Reference Vaina, Makris, Kennedy and Cowey1988) and color perception (Cavanagh et al., Reference Cavanagh, Hénaff, Michel, Landis, Troscianko and Intriligator1998) have provided further insights into the organization of the visual system. Few studies have considered whether these selective deficits can be captured in DNNs despite the ease of carrying out lesion studies in networks (for some recent investigations, see Hannagan et al., Reference Hannagan, Agrawal, Cohen and Dehaene2021; Ratan Murty et al., Reference Ratan Murty, Bashivan, Abate, DiCarlo and Kanwisher2021).
4.2.7. Computing shape from nonshape information
Shape is the primary feature that humans rely on when classifying objects, but there are notable examples of recognizing objects based on nonshape features. Classic examples include computing shape from shading (Ramachandran, Reference Ramachandran1988) and structure from motion (Ullman, Reference Ullman1979). These findings provide important information about how various forms of information are involved and interact in computing shape for the sake of object recognition in humans, but this work has been given little consideration when developing DNNs of vision. For some early work with connectionist networks, see Lehky and Sejnowski (Reference Lehky and Sejnowski1988), and for some recent work with DNNs in this general direction, see Fleming and Storrs (Reference Fleming and Storrs2019).
4.2.8. Four correspondences reported by Jacob et al. (Reference Jacob, Pramod, Katti and Arun2021)
As discussed above, Jacob et al. (Reference Jacob, Pramod, Katti and Arun2021) identified several dissimilarities between DNNs and humans. They also reported four behavioral experiments that they took as evidence of important similarities, but in all cases, the results lend little support for their conclusion and more work is required. First, the authors report that both DNNs and humans respect Weber's law, according to which the just noticeable difference between two stimuli is a constant ratio of the original stimulus. However, the conditions under which Weber's law was assessed in humans (reaction times in an eye-tracking study) and DNNs (the Euclidean distance similarity between activation values in hidden layers) were very different, and DNNs only manifest this effect for one of the two stimulus dimensions tested (line lengths but not image intensities). Furthermore, DNNs only supported a Weber's law effect at the highest convolutional layers, whereas in humans, these effects are the product of early vision (e.g., Van Hateren, 1993). Second, Jacob et al. found that DNNs, like humans, are sensitive to scene incongruencies, with reduced object recognition when objects are presented in unusual contexts (e.g., an image of an axe in a supermarket). However, as noted by Jacob et al., CNNs tend to be far more context-dependent than humans, with DNNs failing to identify objects in unusual contexts, such as an elephant in a living room (Rosenfeld, Zemel, & Tsotsos, Reference Rosenfeld, Zemel and Tsotsos2018). Third, Jacob et al. reported that DNNs show something analogous to the Thatcher effect in which humans are relatively insensitive to a specific distortion of a face (the inversion of the mouth) when the entire face is inverted. However, they did not test a key feature of the Thatcher effect, namely, that it is stronger for faces compared to similar distortions for other categories of objects (Wong, Twedt, Sheinberg, & Gauthier, Reference Wong, Twedt, Sheinberg and Gauthier2010). Fourth, the authors reported that both humans and DNNs find reflections along the vertical axis (mirror reversals) more similar than reflections along the horizontal axis (inverting an image). However, it is unclear how much weight should be given to this success given that both humans and DNNs experience reflections along the vertical axis much more often. It seems likely that any model that learns could account for this finding.
In sum, many key psychological phenomena have largely been ignored by the DNN community, and the few reports of interesting similarities are problematic or require additional research to determine whether the outcomes reflect theoretically meaningful correspondences or are instead mediated by qualitatively different processes. Furthermore, the few promising results are embedded in a long series of studies that provide striking discrepancies between DNNs and human vision (as summarized above).
5. Deep problems extend to neighboring fields
Although we have focused on DNN models of human vision, the underlying problem is more general. For example, consider DNNs of audition and natural language processing. As is the case with vision, there is excitement that DNNs enable some predictive accuracy with respect to human brain activity (e.g., Kell et al., Reference Kell, Yamins, Shook, Norman-Haignere and McDermott2018; Millet et al., Reference Millet, Caucheteux, Boubenec, Gramfort, Dunbar, Pallier and King2022; Schrimpf et al., Reference Schrimpf, Blank, Tuckute, Kauf, Hosseini, Kanwisher and Fedorenko2021) but at the same time, when models are tested against psychological findings, they fail to support key human-like performance patterns (e.g., Adolfi et al., Reference Adolfi, Bowers and Poeppel2023; Feather et al., Reference Feather, Durango, Gonzalez and McDermott2019; Weerts, Rosen, Clopath, & Goodman, Reference Weerts, Rosen, Clopath and Goodman2021). And again, the prediction-based experiments used to highlight DNN–human similarities rely on datasets that are not manipulated to test hypotheses about how the predictions are made. For instance, Caucheteux, Gramfort, and King (Reference Caucheteux, Gramfort and King2022) report that the DNN GPT-2 that generates impressively coherent text also predicts brain activation of humans who listen to 70 min of short stories, with the correlation between the true fMRI responses and the fMRI responses linearly predicted from the model approaching 0.02 (or approximately 0.004 of the BOLD variance). In addition, Caucheteux et al. highlight that these predictions correlate with subjects' comprehension scores as assessed for each story at a much higher level (r = 0.50, p < 10–15), and based on this, the authors concluded: “Overall, this study shows how deep language models help clarify the brain computations underlying language comprehension.” However, given that the stories were not systematically manipulated to test any hypothesis, this correlation could have other causes, such as the frequency of words in the stories. Indeed, when the correlation between actual BOLD and predicted BOLD is approximately 0.02, there are undoubtedly many confounding factors that could drive the latter correlation.
Similarly, DNNs that generate coherent text also successfully reproduce a range of human language behaviors, such as accurately predicting number agreement between nouns and verbs (Gulordava, Bojanowski, Grave, Linzen, & Baroni, Reference Gulordava, Bojanowski, Grave, Linzen and Baroni2018). Again, this has led researchers to suggest that DNNs may be models of human linguistic behavior (e.g., Pater, Reference Pater2019). However, Mitchell and Bowers (Reference Mitchell and Bowers2020) show that such networks will also happily learn number agreement in impossible languages within unnatural sentence structures, that is, structures that are not found within any natural languages and which humans struggle to process. This ability to learn impossible languages is similar to the ability of DNNs to recognize ~1 million instances of random TV-static (sect. 4.1.8). In addition, when Mitchell and Bowers (Reference Mitchell and Bowers2020) analyzed how knowledge was stored in these networks they found overlapping weights supporting the natural and unnatural structures, again highlighting the nonhuman-like nature of the knowledge learned by the networks. So again, running controlled experiments that manipulate independent variables highlight important differences between DNNs and humans. It is also important to note that state-of-the-art DNNs of natural language processing receive training that far exceeds any human experience with languages (e.g., GPT-2 was trained on text taken from 45 million website links and GPT-3 was trained on hundreds of billions of words). This highlights how these DNNs are missing key human inductive biases that facilitate the learning of natural languages but impair the learning of unstructured languages (something akin to a human language acquisition device).
Likewise, in the domain of memory and navigation, there are multiple papers claiming that grid cells in the entorhinal–hippocampal circuit emerge in DNNs trained on path integration, that is, estimating one's spatial position in an environment by integrating velocity estimates. This is potentially an important finding given that grid cells in the entorhinal–hippocampal circuit are critical brain structures for navigation, learning, and memory. However, it turns out that these results are largely driven by a range of post-hoc implementation choices rather than principles of neural circuits or the loss function(s) they might optimize (Schaeffer et al., Reference Schaeffer, Khona and Fiete2022). That is, when Schaeffer et al. systematically manipulated the encoding of the target or various hyperparameters, they found the results that were idiosyncratic to specific conditions, and these conditions may be unrealistic. The problem in all cases is that DNN–human similarities are quick to be highlighted and the conclusions are not supported when more systematic investigations are carried out.
6. How should we model human vision?
The appeal of DNNs is that they are an extraordinary engineering success story, with models of object recognition matching or exceeding human performance on some benchmark tests. However, as we have argued, the claim that these models recognize objects in a similar way to humans is unjustified. How can DNNs be useful to scientists interested in modeling human object recognition and vision more broadly? In our view, the first step is to start building models of human object recognition and vision that account for key experimental results reported in psychology rather than ones that perform best on prediction-based experiments. The approach should be the same as it is for all scientific endeavors: Use models to test specific hypotheses about how a system works.
6.1. Four different approaches to developing biologically plausible models of human vision
If one accepts our argument that DNN models of human vision should focus on accounting for experimental studies that manipulate independent variables, it is still the case that very different approaches might be pursued. In our view, all the following approaches should be considered. The simplest transition would be to continue to work with standard DNNs that perform well in identifying naturalistic images but modify their architectures, optimization rules, and training environments to better account for key experimental results in psychology (many of which are reviewed in sect. 4) as well as other datasets that assess key behavior findings under controlled conditions (e.g., Crosby, Beyret, & Halina, Reference Crosby, Beyret and Halina2019). This would just involve moving from prediction-based experiments to controlled ones. Key experiments from psychology (as reviewed in sect. 4) could be tNote, that the authors of Brain-Score (Schrimpf et al., Reference Schrimpf, Kubilius, Hong, Majaj, Rajalingham, Issa and DiCarlo2020a, Reference Schrimpf, Kubilius, Lee, Murty, Ajemian and DiCarlo2020b) have highlighted that more benchmarks will be added to the battery of tests, but the problem remains that these and many other authors are making strong claims based on current results, and when experiments are added to the Brain-Score benchmark that do manipulate independent variables (e.g., Geirhos et al., Reference Geirhos, Narayanappa, Mitzkus, Thieringer, Bethge, Wichmann and Brendel2021), these manipulations are ignored and the data are analyzed in a prediction-based analysis. Given that current DNNs designed to classify naturalistic images account for almost no psychological findings, it is not clear whether modifications of existing models will be successful, but it is worth exploring, if only to highlight how very different approaches are needed.
Another approach would be to abandon the DNNs that have been built to support engineering objectives (such as performing well on large datasets like ImageNet) and focus on networks designed to account for key psychological phenomena directly. For example, consider the work of Stephen Grossberg and colleagues, recently reviewed in an accessible book that avoids mathematics and focuses on intuitions (Grossberg, Reference Grossberg2021). Their models include inhibitory mechanisms designed to support Weber law dynamics so that networks are sensitive to both small visual contrasts as well as encoding a wide range of visual intensities (the noise–saturation dilemma; Carpenter & Grossberg, Reference Carpenter and Grossberg1981); circuits to account for various grouping phenomena that lead to illusory boundaries among other illusions (Grossberg & Mingolla, Reference Grossberg and Mingolla1987); complementary circuits for computing boundaries and surfaces in order to explain the perception of occluded objects, figure-ground organization, and a range of additional visual illusions (Grossberg, Reference Grossberg2000); adaptive resonance theory (ART) networks that learn to classify new visual categories quickly without catastrophically forgetting previously learned ones (the stability–plasticity dilemma; Grossberg, Reference Grossberg1980); among other neural designs used to address core empirical findings. Although these models cannot classify photographic images, they provide more insights into how the human visual system works compared to the DNNs that sit at the top of the Brain-Score leaderboard.
Yet another approach (that overlaps in various ways with the approaches above) would be to build models that support various human capacities that current DNNs struggle with, such as out-of-domain generalization and visual reasoning. That is, rather than making DNNs more human-like in domains in which they are already engineering successes (e.g., modifying DNNs that perform well on ImageNet so that they classify images based on shape rather than texture), instead focus on addressing current performance (engineering) failures (e.g., Francis et al., Reference Francis, Manassi and Herzog2017; George, Reference George, Lehrach, Kansky, Lázaro-Gredilla, Laan, Marthi and Phoenix2017). For example, one long-standing claim is that symbolic machinery needs to be added to neural networks to support the forms of generalization that humans are capable of (Fodor & Pylyshyn, Reference Fodor and Pylyshyn1988; Greff, van Steenkiste, & Schmidhuber, Reference Greff, van Steenkiste and Schmidhuber2020; Holyoak & Hummel, Reference Holyoak, Hummel, Dietrich and Markman2000; Marcus, Reference Marcus1998; Pinker & Prince, Reference Pinker and Prince1988). Interestingly, researchers who have long rejected symbolic models have recently been developing models more in line with a symbolic approach in an attempt to support more challenging forms of visual reasoning and generalization (Sabour, Frosst, & Hinton, Reference Sabour, Frosst and Hinton2017; Webb, Sinha, & Cohen, Reference Webb, Sinha and Cohen2021; for some discussion, see Bowers, Reference Bowers2017). Indeed, a range of different network architectures have recently been advanced to support more challenging forms of generalization (Doumas, Puebla, Martin, & Hummel, Reference Doumas, Puebla, Martin and Hummel2022; Graves et al., Reference Graves, Wayne, Reynolds, Harley, Danihelka, Grabska-Barwińska and Hassabis2016; Mitchell & Bowers, Reference Mitchell and Bowers2021; Vankov & Bowers, Reference Vankov and Bowers2020) because any model of human vision will ultimately have to support these skills. Of course, it is also necessary to assess whether any successful models perform tasks in a human-like way by testing how well the models explain the results from relevant psychological experiments.
Yet another possible way forward is to use evolutionary algorithms to build neural networks and see if human-like solutions emerge. A key advantage of this approach is that neural network architectures might be evolved that are hard to invent, and indeed, it is sometimes argued that evolutionary algorithms may be the fastest route to building artificial intelligence that rivals human intelligence (e.g., Wang et al., Reference Wang, Lehman, Rawal, Zhi, Li, Clune and Stanley2020). However, with regard to building models of the human visual system, this approach faces a similar challenge to current DNN modeling, namely, there is no reason to expect the evolved solutions will be similar to human solutions. Indeed, as discussed above, the human visual system is the product of many different and unknown selection pressures applied over the course of millions of years (modification with descent) and it will never be possible to recapitulate all these pressures. So however successful models become within this framework, it cannot be assumed that the evolved solutions will be human-like. Again, the only way to find out will be to test these models on relevant psychological datasets.
Whatever approach one adopts to modeling human object recognition and vision more broadly, the rich database of vision experiments in psychology should play a central role in model development and assessment (for related arguments in the domain of object recognition and classical conditioning, see Peters & Kriegeskorte, Reference Peters and Kriegeskorte2021, and Bhattasali, Tomov, & Gershman, Reference Bhattasali, Tomov and Gershman2021, respectively; but see Lonnqvist, Bornet, Doerig, & Herzog, Reference Lonnqvist, Bornet, Doerig and Herzog2021, for a different perspective). The approach of comparing models on prediction-based experiments makes sense in the context of building models that solve engineering solutions, but when trying to understand natural systems, the standard methods of science should be adopted: Use models to test hypotheses that are evaluated in experiments which manipulate independent variables. By this criterion, models developed in psychology provide superior accounts of human vision than current DNNs that have gathered so much attention.
7. Conclusions
DNNs outperform all other models on prediction-based experiments carried out on behavioral and brain datasets of object recognition but fail to account for almost all psychological studies of vision. This leads to some obvious questions: Do current prediction-based experiments provide a flawed measure of DNN–human similarity? What have we learned about human visual recognition from DNNs? In what way are DNNs the “best models of human visual object recognition”? In our view, the most obvious explanation for the contrasting results obtained with prediction-based and controlled studies is that prediction-based studies provide a flawed measure of DNN–human correspondences, and consequently, it is unclear what we can learn about human vision by relying upon them, let alone claim DNNs are the best models of biological object recognition.
We suggest that theorists should adopt a more standard research agenda, namely, assess how well models account for a range of data taken from controlled experiments that manipulate independent variables designed to test specific hypotheses. In this context, models are used to explain key empirical findings, and confidence in models grows to the extent that they survive stringent tests designed to falsify them. We have focused on DNN models of object recognition as this is the domain in which the strongest claims have been made but the same considerations apply to all domains of adaptive behavior. In our view, the current prediction-based studies carried out on behavioral and brain datasets are very likely leading us up blind alleys and distracting us from more promising approaches to studying human vision and intelligence more broadly.
Financial support
This project has received funding from the European Research Council (ERC) under the European Union's Horizon 2020 research and innovation program (grant agreement No 741134).
Competing interest
None.










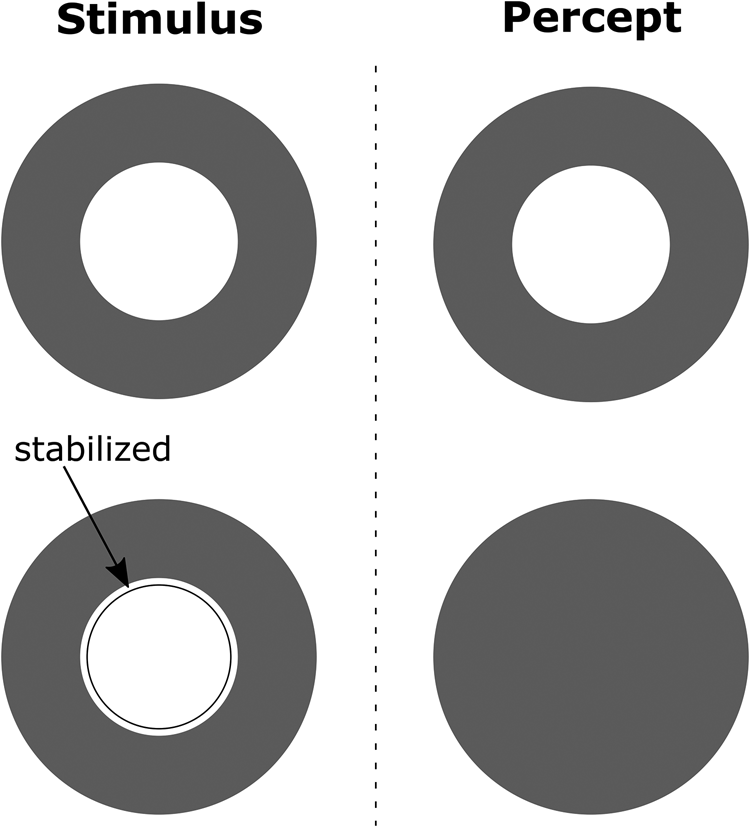





Target article
Deep problems with neural network models of human vision
Related commentaries (29)
Explananda and explanantia in deep neural network models of neurological network functions
A deep new look at color
Beyond the limitations of any imaginable mechanism: Large language models and psycholinguistics
Comprehensive assessment methods are key to progress in deep learning
Deep neural networks are not a single hypothesis but a language for expressing computational hypotheses
Even deeper problems with neural network models of language
Fixing the problems of deep neural networks will require better training data and learning algorithms
For deep networks, the whole equals the sum of the parts
For human-like models, train on human-like tasks
Going after the bigger picture: Using high-capacity models to understand mind and brain
Implications of capacity-limited, generative models for human vision
Let's move forward: Image-computable models and a common model evaluation scheme are prerequisites for a scientific understanding of human vision
Modelling human vision needs to account for subjective experience
Models of vision need some action
My pet pig won't fly and I want a refund
Neither hype nor gloom do DNNs justice
Neural networks need real-world behavior
Neural networks, AI, and the goals of modeling
Perceptual learning in humans: An active, top-down-guided process
Psychophysics may be the game-changer for deep neural networks (DNNs) to imitate the human vision
Statistical prediction alone cannot identify good models of behavior
The model-resistant richness of human visual experience
The scientific value of explanation and prediction
There is a fundamental, unbridgeable gap between DNNs and the visual cortex
Thinking beyond the ventral stream: Comment on Bowers et al.
Using DNNs to understand the primate vision: A shortcut or a distraction?
Where do the hypotheses come from? Data-driven learning in science and the brain
Why psychologists should embrace rather than abandon DNNs
You can't play 20 questions with nature and win redux
Author response
Clarifying status of DNNs as models of human vision